ผมมีปัญหา กับ การทำ MODBUS บน Arduino MEGA 2560
Library SimpleModbusMaster.h
https://github.com/pepsilla/Arduino/blob/master/MODBUS/ASCII/libraries/SimpleModbusMaster/SimpleModbusMaster.h
โดยผมมีอุปกรณ์ดังนี้ที่ต้องการให้เชื่อมต่อกัน
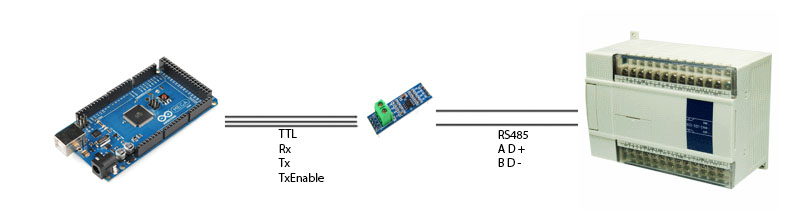
โดยรับ ค่า String จาก Serial Port เพื่อทำตาม ฟังก์ชันที่กำหนดไว้ โดย จะกำหนด ค่าการเชื่อมต่อ
BusRate 19200
Serial_8N2
Serial1
Timeout 1000
Pollong 200
Retry_count 10
Slave_adr 1
regs 3
โดยมีฟังชั้นการ ส่งค่าออก ประมาณนี้ เพื่อเขียนให้ M0 มีสภาวะการทำงานเป็น 1
[Spoil] คลิกเพื่อดูข้อความที่ซ่อนไว้void m0_1() {
word FC0_1, REGP0_1, TNRR0_1, ARY0_1;
FC0_1 = 0x05;
REGP0_1 = 0;
TNRR0_1 = 1;
ARY0_1 = 0x0001;
modbus_construct(&packets[PACKET0], slave_adr, FC0_1, REGP0_1, TNRR0_1, ARY0_1);
modbus_update();
}
ปัญหาที่พบคือจาก Mega 2560 ไปที่ PLC ตรงๆ จะมีปัญหา คือไม่มีอะไรเกิดขึ้น
แต่ถ้าใช้ การต่อลักษณะนี้ แล้วเปิด โปรแกรม “pyModSlave” โดยให้เป็น Slave 1 เหมือนกัน
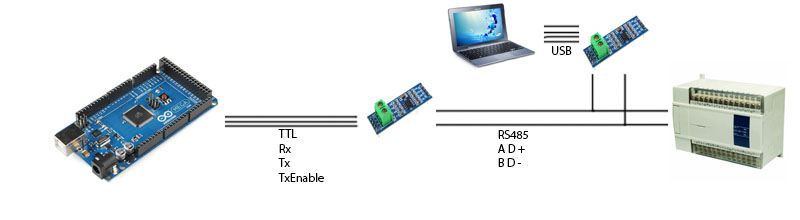
ปรากฏว่า เมื่อรับค่าจาก Serial3 หลอดไฟที่ผมเขียนผ่าน ladder ติด
|------------------|M0|----------------------------------------( Y0 )-------------------|
ผมลองเปิด RAW Monitor ของ “pyModSlave” พบว่า PLC แสดงสถานะตามโปรแกรม “pyModSlave” ขาตอบกลับแทน
ต่อมา ถ้าผมตัดส่วน PLC ออกไป จาก Arduino ไปที่ “pyModSlave” คือรับค่าและอ่านค่าของกันและกันไปปกติ
ในทางกลับกันถ้าผม ต่อ USB to RS485 ไปที่ PLC แล้วใช้โปรแกรม "qModMaster" ก็สามารถส่งได้ปกติ
เมื่อศึกษา รูปแบบการส่ง ค่า จาก RAW monitor แล้วพบว่า 0x0001 // 0xFF00 นี้มันจะมีการสลับกันไปมา ( Value ที่ส่ง)
แต่ถ้าใช้ค่า 0x0001 PC <--- 485 ---> Arduino สามารถรับส่งได้ปกติ 0xFF00 ไม่สามารถเขียนค่าจาก Master ได้
ตอนนี้งง มาก เลยมาตามหาผู้รู้ครับ
ขอบคุณสำหรับคำตอบนะครับ
Code
[Spoil] คลิกเพื่อดูข้อความที่ซ่อนไว้#include <SimpleModbusMaster.h>
//////////////////// Comment for Valuable ///////////////
/*
regs = "Registor/Coil value in Array Block"
FC# = "Fuction Code for Operation COIL_OFF, 0x0000 // Function 5 OFF request is 0x0000
COIL_ON, 0xFF00 // Function 5 ON request is 0xFF00
READ_COIL_STATUS, 0x01, 1 // Reads the ON/OFF status of discrete outputs (0X references, coils) in the slave.
READ_INPUT_STATUS, 0x02, 2 // Reads the ON/OFF status of discrete inputs (1X references) in the slave.
READ_HOLDING_REGISTERS, 4x03, 3 // Reads the binary contents of holding registers (4X references) in the slave.
READ_INPUT_REGISTERS, 4x04,4 // Reads the binary contents of input registers (3X references) in the slave. Not writable.
FORCE_SINGLE_COIL, 0x05, 5 // Forces a single coil (0X reference) to either ON (0xFF00) or OFF (0x0000).
PRESET_SINGLE_REGISTER, 4x06, 6 // Presets a value into a single holding register (4X reference).
FORCE_MULTIPLE_COILS, 0x15, 15 // Forces each coil (0X reference) in a sequence of coils to either ON or OFF.
PRESET_MULTIPLE_REGISTERS, 4x16, 16 // Presets values into a sequence of holding registers (4X references).
REGP# = "Registor/Coil Position/Taget"
TNRR# = "Total Number of Registor/Coil in Rage on Taget"
ARY# = "Array to Keep/Write regitors/coil value"
*/
//////////////////// Port information ///////////////////
#define baud 19200
#define timeout 1000 // Do everything in 1 loop.
#define polling 200 // the scan rate "200ms For Scanning"
#define retry_count 10
#define slave_adr 1
// used to toggle the receive/transmit pin on the driver rs485
#define TxEnablePin 2
#define LED 9
// The total amount of available memory on the master to store data
#define TOTAL_NO_OF_REGISTERS 3
int count = 0;
//////////////////////////////// This is the easiest way to create new packets ////////////////////////////////////////////
//////////////////////////////// Add as many as you want. TOTAL_NO_OF_PACKETS /////////////////////////////////////////////
/////////////////////////////////////////// is automatically updated. /////////////////////////////////////////////////////
enum
{
PACKET100,
PACKET0, // Packet for M0
PACKET1, // Packet for M1
TOTAL_NO_OF_PACKETS // leave this last entry
};
// Create an array of Packets to be configured
Packet packets[TOTAL_NO_OF_PACKETS];
// Masters register array
unsigned int regs[TOTAL_NO_OF_REGISTERS];
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////SETUP/////////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
void setup()
{
// Print Port
Serial1.begin(19200);
Serial2.begin(19200);
// INPUT From ESP8266
Serial3.begin(19200);
// Array Value for Setting
regs[0] = 0x0000; // Function 0X05 OFF request is 0x0000
regs[1] = 0xFF00; // Function 0X05 ON request is 0xFF00
// Setup to read Registor/Coil form Modbus Slave 1 and keep in Array regs 2
// modbus_construct(&packets[PACKET100], slave_adr, 1, 0, 1, 2);
// Initialize the Modbus Finite State Machine
modbus_configure(&Serial1, baud, SERIAL_8N2, timeout, polling, retry_count, TxEnablePin, packets, TOTAL_NO_OF_PACKETS, regs);
pinMode(LED, OUTPUT);
}
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
/////////////////////////////////////////////////////////////MAIN/////////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
void loop()
{
// Main loop Fuction to Rx value
if (Serial3.available()) {
//
String val = Serial3.readString();
if (val == "1") {
do {
count++;
delay(50);
m0_0(); //M0 state "0" Fuction call
delay(50);
} while (count == 10);
} else if (val == "2") {
do {
count++;
delay(50);
m0_1(); //M0 state "1" Fuction call
delay(50);
} while (count == 10);
} else if (val == "3") {
delay(50);
m1_0(); //M1 state "0" Fuction call
delay(50);
} else if (val == "4") {
delay(50);
m1_1(); //M1 state "1" Fuction call
delay(50);
} else {
//Nothing
}
} else {
// Do Read or Write Form "void setup()" Fuction
modbus_update();
// Print Array value 2
Serial2.print(regs[2]);
// Update every 1 second
delay(150);
}
delay(500);
}
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////FUNCTION//////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
void m0_0() {
word FC0, REGP0, TNRR0, ARY0;
FC0 = 0x05;
REGP0 = 0;
TNRR0 = 1;
ARY0 = 0x0000;
modbus_construct(&packets[PACKET0], slave_adr, FC0, REGP0, TNRR0, ARY0);
modbus_update();
}
void m0_1() {
word FC0_1, REGP0_1, TNRR0_1, ARY0_1;
FC0_1 = 0x05;
REGP0_1 = 0;
TNRR0_1 = 1;
ARY0_1 = 0x0001;
modbus_construct(&packets[PACKET0], slave_adr, FC0_1, REGP0_1, TNRR0_1, ARY0_1);
modbus_update();
}
void m1_0() {
word FC1, REGP1, TNRR1, ARY1;
FC1 = 0x05;
REGP1 = 1;
TNRR1 = 1;
ARY1 = 0x0001;
modbus_construct(&packets[PACKET1], slave_adr, FC1, REGP1, TNRR1, ARY1);
modbus_update();
}
void m1_1() {
word FC1_1, REGP1_1, TNRR1_1, ARY1_1;
FC1_1 = 0x05;
REGP1_1 = 1;
TNRR1_1 = 1;
ARY1_1 = 0x0001;
modbus_construct(&packets[PACKET1], slave_adr, FC1_1, REGP1_1, TNRR1_1, ARY1_1);
modbus_update();
}

Arduino MODBUS กับ PLC แล้ว ต่อ Direct ผ่าน RS485 ไม่ได้
Library SimpleModbusMaster.h
https://github.com/pepsilla/Arduino/blob/master/MODBUS/ASCII/libraries/SimpleModbusMaster/SimpleModbusMaster.h
โดยผมมีอุปกรณ์ดังนี้ที่ต้องการให้เชื่อมต่อกัน
โดยรับ ค่า String จาก Serial Port เพื่อทำตาม ฟังก์ชันที่กำหนดไว้ โดย จะกำหนด ค่าการเชื่อมต่อ
BusRate 19200
Serial_8N2
Serial1
Timeout 1000
Pollong 200
Retry_count 10
Slave_adr 1
regs 3
โดยมีฟังชั้นการ ส่งค่าออก ประมาณนี้ เพื่อเขียนให้ M0 มีสภาวะการทำงานเป็น 1
[Spoil] คลิกเพื่อดูข้อความที่ซ่อนไว้
ปัญหาที่พบคือจาก Mega 2560 ไปที่ PLC ตรงๆ จะมีปัญหา คือไม่มีอะไรเกิดขึ้น
แต่ถ้าใช้ การต่อลักษณะนี้ แล้วเปิด โปรแกรม “pyModSlave” โดยให้เป็น Slave 1 เหมือนกัน
ปรากฏว่า เมื่อรับค่าจาก Serial3 หลอดไฟที่ผมเขียนผ่าน ladder ติด
|------------------|M0|----------------------------------------( Y0 )-------------------|
ผมลองเปิด RAW Monitor ของ “pyModSlave” พบว่า PLC แสดงสถานะตามโปรแกรม “pyModSlave” ขาตอบกลับแทน
ต่อมา ถ้าผมตัดส่วน PLC ออกไป จาก Arduino ไปที่ “pyModSlave” คือรับค่าและอ่านค่าของกันและกันไปปกติ
ในทางกลับกันถ้าผม ต่อ USB to RS485 ไปที่ PLC แล้วใช้โปรแกรม "qModMaster" ก็สามารถส่งได้ปกติ
เมื่อศึกษา รูปแบบการส่ง ค่า จาก RAW monitor แล้วพบว่า 0x0001 // 0xFF00 นี้มันจะมีการสลับกันไปมา ( Value ที่ส่ง)
แต่ถ้าใช้ค่า 0x0001 PC <--- 485 ---> Arduino สามารถรับส่งได้ปกติ 0xFF00 ไม่สามารถเขียนค่าจาก Master ได้
ตอนนี้งง มาก เลยมาตามหาผู้รู้ครับ
ขอบคุณสำหรับคำตอบนะครับ
Code
[Spoil] คลิกเพื่อดูข้อความที่ซ่อนไว้