Int-Ball

เจ้าหนู Int-Ball หุ่นยนต์ตัวน้อยของญี่ปุ่นที่เพิ่งขึ้นไปบินว่อนอยู่บนสถานีอวกาศนานาชาติ Int-Ball นี่จริงๆแล้วจะเรียกว่าเป็นโดรนก็ได้ เพราะหน้าที่หลักเค้าคือกล้องถ่ายภาพที่คอยลอยละล่องถ่ายภาพอุปกรณ์ข้างในและการปฏิบัติงานของนักบินอวกาศเพื่อส่งภาพกลับมายังภาคพื้นดิน สามารถทำงานได้อย่างอิสระหรือสั่งการได้จากภาคพื้นดิน
และไปช่วยถ่ายภาพต่างๆ เพื่อลดเวลาของนักบินอวกาศ ที่ต้องเสียเวลาไปถึง 10% ในการถ่ายภาพ เจ้าหนูตัวนี้ถูกสร้างขึ้นมาด้วย 3D Printer
นักบินอวกาศของสหรัฐอาหรับเอมิเรตส์ใช้หุ่นนี้สื่อสารกับเด็กๆในประเทศให้รู้จักกับเรื่องราวบนอวกาศด้วย
Cr. facebook.com/origimon/
“เฟดอร์”––Fedor
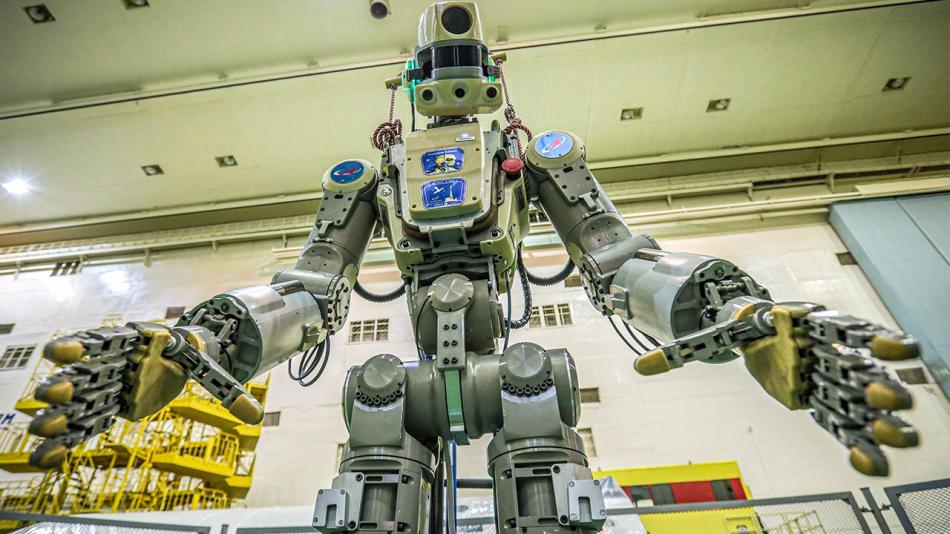
หุ่นยนต์อวกาศรัสเซีย รูปร่างสูงใหญ่ 180 ซม. น้ำหนัก 160 กก. มีลักษณะเหมือนคน เดินสองขา มีสองมือและมี 10 นิ้ว เป้าหมายภารกิจเบื้องต้น คือช่วยเหลือสนับสนุนรับคำสั่ง “อเล็กซานเดอร์ สวอร์ตซอฟ” มนุษย์อวกาศรัสเซียบนสถานีอวกาศนานาชาติ เน้นภารกิจเสี่ยงภัยและกู้ภัย
“เฟดอร์” กำหนดอยู่ทำภารกิจบนไอเอสเอส 10 วัน แผนเดินทางกลับโลกวันที่ 7 ก.ย.2019 ทักษะการทำงานถูกป้อนข้อมูลมาแล้ว อาทิ ต่อเชื่อมหรือปลดสายไฟตามรูปแบบมาตรฐาน ใช้ไขควงและสว่านได้อย่างมีประสิทธิภาพ เปิดขวดน้ำเองได้ ใช้อุปกรณ์ดับเพลิงได้เอง แต่สิ่งที่ต้องเรียนรู้เพิ่มเติมคือการเดินและใช้ชีวิตใกล้เคียงมนุษย์อวกาศ บนสภาพแรงดึงดูดน้อย แต่ก็สามารถถูกบังคับควบคุมได้โดยมนุษย์ผ่านคำสั่งระยะไกลจากศูนย์บนพื้นโลก
สำคัญอีกอย่างคือ “เฟดอร์” สามารถยิงปืนพกสั้นได้คราวละ 2 กระบอกอย่างแม่นยำ... แนวโน้มอนาคตอันใกล้ “หุ่นยนต์” ผลผลิตจากหลายประเทศจะถูกส่งขึ้นไปร่วมงานกับมนุษย์บนห้วงอวกาศเหมือนในภาพยนตร์...
Cr.thairath.co.th/
Robonaut
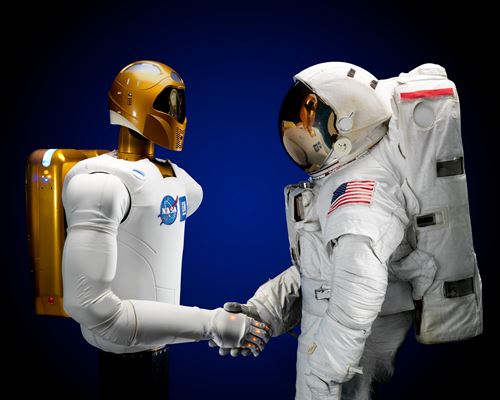
ได้รับการพัฒนาขึ้นครั้งแรกเมื่อปี 1996 โดยนาซ่าคาดหวังให้หุ่นยนต์คอยช่วยเหลือสนับสนุน และเข้าไปทำงานในบริเวณพื้นที่เสี่ยงอันตรายที่มนุษย์ไม่สามารถเข้าถึงได้ โครงสร้างพื้นฐานของมันมีลักษณะที่ค่อนข้างใกล้เคียงกับมนุษย์ ประกอบไปด้วย ศีรษะ ลำตัวและแขนที่สามารถเคลื่อนไหวได้อย่างอิสระ ภายในศีรษะติดตั้งกล้องสำหรับบันทึกภาพ และกล้องสำหรับควบคุม มันสามารถเคลื่อนที่ไปบริเวณใดก็ได้ของยานอวกาศ ผ่านระบบล้อเลื่อน และการยึดเข้ากับชิ้นส่วนภายในยานอวกาศ
มันเคยถูกนำขึ้นไปปฏิบัติหน้าที่จริงบนกระสวยอวกาศ STS-133 เมื่อปี 2011 ที่ผ่านมา โดยมันสามารถปฏิบัติหน้าที่พื้นฐานอย่างการหยิบจับสิ่งของ และการบังคับควบคุมปุ่มต่างๆ ในยานอวกาศ นับเป็นเวลานานกว่า 15 ปีที่นาซ่าเริ่มต้นพัฒนา จนสามารถปฏิบัติงานจริงได้เป็นผลสำเร็จ
ปัจจุบัน Robonaut อยู่ในช่วงพัฒนาเทคโนโลยีเพื่อเตรียมความพร้อมสำหรับภารกิจในอนาคต ทางนาซ่าวางแผนให้มันเป็นผู้ช่วยสำคัญที่มีความสามารถเทียบเท่ามนุษย์ อย่างการบังคับยานอวกาศ ออกสำรวจร่วมกับมนุษย์ สนับสนุนกิจกรรมทุกอย่างขณะปฏิบัติหน้าที่ในอวกาศ โดยนาซ่าวางแผนให้แล้วเสร็จก่อนภารกิจสำรวจดาวอังคารครั้งใหม่ในปี 2030
Cr.SpokeDark.TV
กิโรโบะ

สำนักงานสำรวจอวกาศญี่ปุ่นส่งหุ่นยนต์ขึ้นสู่อวกาศ โดยใช้จรวดบรรทุกยานขนส่งสินค้าไร้คนบังคับ ที่บรรทุกทั้งหุ่นยนต์ นักบินอวกาศ 1 คน พร้อมด้วยเสบียงและอุปกรณ์ หนักเกือบ 3.5 ตัน ขึ้นจากฐานปล่อยที่ศูนย์อวกาศ ทาเนงะชิมะ จังหวัดโคโงชิมะ และยานขนส่งสลัดตัวออกจากจรวดเพียง 15 นาทีหลังจรวดขึ้นจากฐานปล่อย โดยคาดว่ายานจะเชื่อมต่อกับสถานีอวกาศนานาชาติได้ในวันที่ 9 ส.ค.2556
หุ่นยนต์ที่ถูกส่งขึ้นไปอวกาศมีชื่อว่า กิโรโบะ มันสามารถพูดภาษาญี่ปุ่นได้และจะขึ้นไปบนสถานี อวกาศเพื่อทำงานร่วมกับนักบินอวกาศชาวญี่ปุ่น โคอิจิ วากาตะ ที่จะถูกส่งขึ้นไปถึงสถานีอวกาศในเดือนพ.ย. นอกจากนี้กิโรโบะจะทดสอบการสื่อสารกับหุ่นยนต์คู่แฝดอีกตัวที่ชื่อ มิราตะ ที่อยู่บนโลกด้วย มิราตะไม่ได้ถูกออกแบบมาให้ไปอวกาศได้ แต่เรียนรู้การสนทนาได้
ชื่อของหุ่นยนต์ เป็นคำผสมระหว่าง กิโบะ ในภาษาญี่ปุ่น ที่แปลว่าความหวัง กับคำว่า robot ในภาษาอังกฤษที่แปลว่า หุ่นยนต์ ทั้งกิโรโบะ และมิราตะ ได้รับการพัฒนาจากหลายองค์กร รวมถึง สำนักงานสำรวจอวกาศญี่ปุ่น มหาวิทยาลัยโตเกียว และบริษัทเอกชนหลายแห่ง โดย บริษัทโรโบ้ การาจ และศูนย์วิจัยวิทยาศาสตร์และเทคโนโลยี พัฒนาตัวหุ่นยนต์และระบบการเคลื่อนไหว ขณะที่บริษัทโตโยต้ารับผิดชอบพัฒนาระบบจดจำเสียง และบริษัทเดนสุ ช่วยสร้างเนื้อหาบทสนทนา หุ่นยนต์ทั้งสองจะจดจำเสียง ใบหน้าและอารมณ์ความรู้สึกได้
โครงการส่งกิโรโบะขึ้นไปอวกาศ มีจุดประสงค์เพื่อทดสอบการสื่อสารระหว่างหุ่นยนต์และคนในอวกาศเป็นครั้งแรกในโลกเพื่อดูว่ามันสามารถสนทนากับคนด้วยตัวเองได้มากน้อยแค่ไหน และทดสอบการควบคุมหุ่นยนต์ทางไกลจากโลก โดยหวังว่าความสำเร็จจะเปิดทางให้ส่งหุ่นยนต์ขึ้นไปช่วยนักบินอวกาศปฏิบัติภารกิจในอวกาศในอนาคต แต่ความท้าทายของภารกิจครั้งนี้ คือ หุ่นยนต์จะเคลื่อนไหวและพูดในสภาวะไร้น้ำหนักได้หรือไม่
Cr.oknation.nationtv.tv
“แอสโตรบี”

นาซาได้พัฒนาหุ่นยนต์ทรงลุกบาศก์ขนาดกว้างด้านละ 1 ฟุตจำนวน 3 ตัว เรียกว่าหุ่นยนต์ฝูงผึ้งอวกาศ หรือ “Astrobees” เพื่อส่งขึ้นไปช่วยงานนักบินอวกาศบนสถานีอวกาศนานาชาติ
หุ่นทั้ง 3 ตัวมีชื่อเรียกว่า “ฮันนี่” “บัมเบิล” และ “ควีน” ทั้ง 3 ตัวมีลักษณะเป็นสี่เหลี่ยมลูกบาศก์ ติดตั้งกล้อง จะบบไจโร ไมโครโฟน ลำโพง เซ็นเซอร์ RFID และเซ็นเซอร์อีกหลากหลายชนิด มีแขนกลเล็กๆ และเคลื่อนที่ไปมาในสถานีอวกาศด้วยการใช้ใบพัดเล็กๆที่ติดตั้งไว้รอบตัว
นาซาส่ง “ขาตั้ง” สำหรับให้เจ้า “แอสโตรบี” ใช้พักผ่อนและชาร์จไฟขึ้นไปกับเที่ยวบินส่งสัมภาระของ Northrop Grumman ตั้งแต่เดือนพฤศจิกายนปี 61และส่งหุ่น 2 ตัวแรกคือ “บัมเบิล” และ “ฮันนี” ขึ้นไปกับเที่ยวบินส่งสัมภาระของ Northrop Grumman อีกครั้งในวันที่ 17 เมษายน 62 ที่ผ่านมา ส่วน “ควีน” หุ่นตัวสุดท้ายยังอยู่ในห้องทดลองภาคพื้น รอส่งขึ้นไปในเที่ยวบินหน้า
หุ่น “แอสโตรบี” มีหน้าที่ช่วยงานที่ต้องทำซ้ำๆเช่นการเช็กสต็อกที่ต้องทำประจำเพื่อดูว่าอาหาร หรือสิ่งจำเป็นในการดำรงชีวิตของนักบินอวกาศเหลือมากน้อยเท่าใด โดยมันสามารถนับจำนวนหรือแยกประเภทสิ่งต่างๆด้วยการอ่านรหัสจากสัญญาณ RFID ทีติดตั้งไว้บนวัตถุนั้น นอกจากนี้มันยังมีหน้าที่หลากหลายเช่นคอยฟังเสียงที่ผิดปกติที่อาจเกิดกับตัวสถานีอวกาศ คอยถ่ายภาพหรือรับคำสั้งให้เคลื่อนย้ายสิ่งของต่างๆหรือช่วยเป็นมือไม้ในการหยิบจับหรือช่วยงานทดลองทางวิทยาศาสตร์ต่างๆ
นักวิทยาศาสตร์บนโลกยังสามารถขอใช้เจ้าหุ่นแอสโตรบีในการทดลองทางวิทยาศาสตร์ต่างๆ โดย AI ในตัวมันเองก็จะเรียนรู้ทุกเรื่องราวตั้งแต่การทรงตัวและการเคลื่อนที่ในที่ไร้แรงโน้มถ่วงไปจนถึงเรื่องราวของการช่วยงานต่างๆ และสั่งให้มันกลับไปที่ “ขาตั้ง” เพื่อชาร์จไฟเมื่อกำลังไฟลดต่ำลง รวมทั้งหาที่ยึดเกาะเมื่อไม่ได้ทำงานเพื่อประหยัดไฟฟ้าของใบพัดทรงตัว
หุ่นทั้ง 3 ตัวคือเวอร์ชันแรกๆของหุ่นช่วยงานในยานอวกาศที่ต้องเดินทางระยะไกลในอนาคต
Cr.stem.in.th
King Louie

วิทยาการหุ่นยนต์ที่มหาวิทยาลัยบริกแฮมยัง(BYU) ด้วยการสนับสนุนทางการเงินขององค์การอวกาศนาซ่าและความร่วมมือกับ Pneubotics เริ่มต้นกำลังพัฒนาหุ่นยนต์เป่าลม King Louie (King Louis ซึ่งได้รับการตั้งชื่อตามอุรังอุตังจากหนังสือป่าปี 1967) แทนที่จะใช้โครงสร้างโลหะใช้ถุงลมนิรภัยการควบคุมความดันอากาศอย่างแม่นยำ (จ่ายผ่านคอมเพรสเซอร์) ซึ่งทำให้สามารถเคลื่อนย้ายและควบคุมด้วยมือ เป็นไปได้ว่าในอนาคตเครื่องเหล่านี้จะถูกใช้ในสถานีอวกาศตาม IEEE Spectrum
หุ่นยนต์เป่าลมเหล่านี้มีมากมายประโยชน์ที่จับต้องได้และถูกกว่า การผลิตส่วนใหญ่ทำจากผ้าและยางและง่ายต่อการซ่อมแซม เมื่อเทียบกับหุ่นยนต์อื่น ๆ ส่วนใหญ่จะเบากว่าปกติ หากจำเป็นพวกเขาสามารถทำขนาดกะทัดรัดที่สุด (มีอากาศลดลง) เพื่อไม่ให้ใช้พื้นที่มาก นอกจากนี้แม้จะมี "ความนุ่มนวล" ของพวกเขาพวกเขาสามารถแข็งแกร่งและรวดเร็วโดยไม่คาดคิด บางทีข้อได้เปรียบที่สำคัญที่สุดของพวกเขาคือหุ่นยนต์เป่าลมนั้นปลอดภัยต่อมนุษย์อย่างสิ้นเชิงเพราะไม่ได้ใช้องค์ประกอบโลหะในการออกแบบ
พวกมันสามารถเป็นทางเลือกที่ง่ายและประหยัดสำหรับหุ่นยนต์โลหะหรืออาวุธหุ่นยนต์ในยานพาหนะทุกพื้นที่ แต่ข้อเสียคือความซุ่มซ่ามและความยากลำบากในการจัดการ ชิ้นส่วนที่เคลื่อนไหวของพวกเขาบิดและงอในแบบที่ยากต่อการทำแบบจำลองและในแต่ละครั้งที่หุ่นยนต์เคลื่อนที่และพองตัวอีกครั้งโครงสร้างภายในและดังนั้นพฤติกรรมของข้อต่อจึงแตกต่าง
Cr.vpchothuegoldenking
วัลคีรี (Valkyrie)

นาซาเตรียมทดสอบประสิทธิภาพของหุ่นยนต์นักบินอวกาศ เพื่อพัฒนาต่อยอดไปสู่การใช้หุ่นยนต์ฮิวแมนนอยด์สำรวจอวกาศ
องค์การบริหารการบินและอวกาศแห่งชาติของสหรัฐ หรือ นาซา เตรียมทดสอบประสิทธิภาพของ วัลคีรี (Valkyrie) หุ่นยนต์เหล็กฮิวแมนนอยด์ สูง 6 ฟุต น้ำหนักประมาณ 130 กก. ที่ถูกพัฒนาขึ้นเป็นหุ่นยนต์นักบินอวกาศ ตั้งแต่ปี 2015 โดยนาซาตั้งเป้าจะใช้มันเป็นหุ่นยนต์รุ่นบุกเบิกในการสำรวจดาวอังคาร ก่อนที่มนุษย์จะขึ้นไปสำรวจจริง
โดยในช่วงกลางปีนี้ นาซาจะจัดการแข่งขัน เพื่อให้มหาวิทยาลัยและทีมวิจัยกว่า 20 ทีม แข่งขันกันทดสอบประสิทธิภาพของเจ้าวัลคีรี ในสภาพแวดล้อมที่ใกล้เคียงกับดาวอังคาร ก่อนจะนำผลที่ได้ไปพัฒนาต่อ โดยมีรางวัลสูงสุดมูลค่ากว่า 1 ล้านดอลลาร์สหรัฐ หรือประมาณ 35 ล้านบาท
Cr.pptvhd36.
ภาพยนตร์ที่เกี่ยวกับหุ่นยนตร์อวกาศ

เรื่องราวมีฉากเป็นอนาคตกันใกล้ที่กองทัพหุ่นยนต์จากต่างดาวเข้ามายึดครองโลก แล้วเด็กหนุ่มที่กล้าหาญ (แม็คออลิฟ) พบวิธีการที่จะควบคุมหุ่นยนต์จากอุปกรณ์ส่งสัญญาณต่างดาวที่คอของเขา และอาจกลายเป็นความหวังเดียวที่จะช่วยมนุษย์โลก
หลังจากที่มนุษย์ปล่อยโลกให้ทิ้งร้างไปด้วยขยะเป็นเวลา 700 ปี วอลล์-อี (WALL-E) หุ่นยนต์กำจัดขยะ มาจากชื่อเต็ม คือ Waste Allocation Load Lifter – Earth-Class ก็ยังคงทำหน้าที่เก็บขยะอยู่บนโลก โดยมีแมลงสาบเป็นเพื่อน จนวันหนึ่งฟ้าก็ส่งหุ่นยนต์สำรวจรุ่นล่าสุดที่ชื่อ อีฟ (EVE) มาจากชื่อเต็มคือ Extraterrestrial Vegetation Evaluator มายังโลกเพื่อค้นหาต้นไม้ วอลล์-อีได้เจอกับอีฟ และตกหลุมรัก หลังจากทั้งคู่ได้สานสัมพันธ์กัน วอลล์-อี ก็ได้มอบของขวัญแก่อีฟ คือต้นไม้ และนั่นเป็นจุดพลิกผันให้วอลล์-อี ต้องเดินทางจากโลกไป ติดตามอีฟมายังยานอวกาศแอกเซี่ยมที่ซึ่งมนุษย์ใช้เป็นยานลี้ภัย เพื่อหนีไปจากโลก
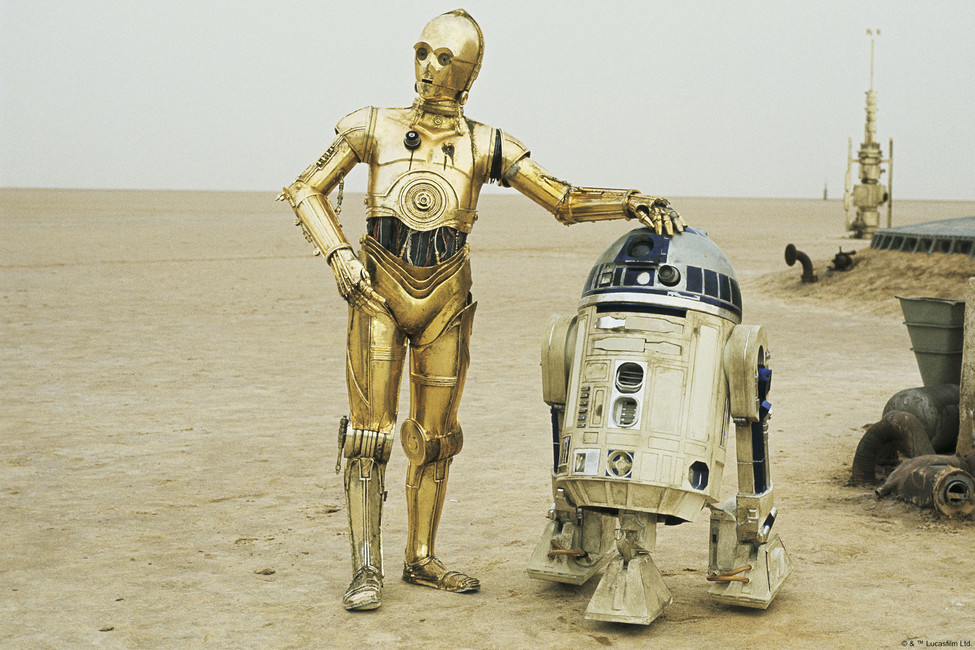
อาร์ทูดีทู (R2-D2) เป็นหุ่นยนต์ในเรื่อง สตาร์ วอร์ส เป็นตัวละครเพียงตัวเดียวที่มีบทบาทในภาพยนตร์สตาร์วอร์สทั้งหกภาคโดยไม่มีการเปลี่ยนแปลงลักษณะหรือแม้แต่เสียงพูด ด้วยความที่มีอุปกรณ์ต่างๆ บรรจุอยู่มากมาย อาร์ทูดีทู จึงเป็นได้ทั้งช่างเครื่องยานอวกาศที่เก่งฉกาจและผู้เชี่ยวชาญการเชื่อมต่อกับคอมพิวเตอร์ฝีมือล้ำเลิศ เป็นเครื่องมือที่ช่วยให้รอดจากสถานการณ์คับขันได้ ตัวอาร์ทูดีทูและคู่หูซีทรีพีโอ ได้รับการยอมรับว่าเป็นหนึ่งในคู่หูที่มีชื่อเสียงที่สุดตลอดกาลในโลกภาพยนตร์
Cr.majorcineplex

หุ่นยนต์อวกาศกับภารกิจผู้ช่วย
เจ้าหนู Int-Ball หุ่นยนต์ตัวน้อยของญี่ปุ่นที่เพิ่งขึ้นไปบินว่อนอยู่บนสถานีอวกาศนานาชาติ Int-Ball นี่จริงๆแล้วจะเรียกว่าเป็นโดรนก็ได้ เพราะหน้าที่หลักเค้าคือกล้องถ่ายภาพที่คอยลอยละล่องถ่ายภาพอุปกรณ์ข้างในและการปฏิบัติงานของนักบินอวกาศเพื่อส่งภาพกลับมายังภาคพื้นดิน สามารถทำงานได้อย่างอิสระหรือสั่งการได้จากภาคพื้นดิน
และไปช่วยถ่ายภาพต่างๆ เพื่อลดเวลาของนักบินอวกาศ ที่ต้องเสียเวลาไปถึง 10% ในการถ่ายภาพ เจ้าหนูตัวนี้ถูกสร้างขึ้นมาด้วย 3D Printer
นักบินอวกาศของสหรัฐอาหรับเอมิเรตส์ใช้หุ่นนี้สื่อสารกับเด็กๆในประเทศให้รู้จักกับเรื่องราวบนอวกาศด้วย
Cr. facebook.com/origimon/
“เฟดอร์”––Fedor
หุ่นยนต์อวกาศรัสเซีย รูปร่างสูงใหญ่ 180 ซม. น้ำหนัก 160 กก. มีลักษณะเหมือนคน เดินสองขา มีสองมือและมี 10 นิ้ว เป้าหมายภารกิจเบื้องต้น คือช่วยเหลือสนับสนุนรับคำสั่ง “อเล็กซานเดอร์ สวอร์ตซอฟ” มนุษย์อวกาศรัสเซียบนสถานีอวกาศนานาชาติ เน้นภารกิจเสี่ยงภัยและกู้ภัย
“เฟดอร์” กำหนดอยู่ทำภารกิจบนไอเอสเอส 10 วัน แผนเดินทางกลับโลกวันที่ 7 ก.ย.2019 ทักษะการทำงานถูกป้อนข้อมูลมาแล้ว อาทิ ต่อเชื่อมหรือปลดสายไฟตามรูปแบบมาตรฐาน ใช้ไขควงและสว่านได้อย่างมีประสิทธิภาพ เปิดขวดน้ำเองได้ ใช้อุปกรณ์ดับเพลิงได้เอง แต่สิ่งที่ต้องเรียนรู้เพิ่มเติมคือการเดินและใช้ชีวิตใกล้เคียงมนุษย์อวกาศ บนสภาพแรงดึงดูดน้อย แต่ก็สามารถถูกบังคับควบคุมได้โดยมนุษย์ผ่านคำสั่งระยะไกลจากศูนย์บนพื้นโลก
สำคัญอีกอย่างคือ “เฟดอร์” สามารถยิงปืนพกสั้นได้คราวละ 2 กระบอกอย่างแม่นยำ... แนวโน้มอนาคตอันใกล้ “หุ่นยนต์” ผลผลิตจากหลายประเทศจะถูกส่งขึ้นไปร่วมงานกับมนุษย์บนห้วงอวกาศเหมือนในภาพยนตร์...
Cr.thairath.co.th/
Robonaut
ได้รับการพัฒนาขึ้นครั้งแรกเมื่อปี 1996 โดยนาซ่าคาดหวังให้หุ่นยนต์คอยช่วยเหลือสนับสนุน และเข้าไปทำงานในบริเวณพื้นที่เสี่ยงอันตรายที่มนุษย์ไม่สามารถเข้าถึงได้ โครงสร้างพื้นฐานของมันมีลักษณะที่ค่อนข้างใกล้เคียงกับมนุษย์ ประกอบไปด้วย ศีรษะ ลำตัวและแขนที่สามารถเคลื่อนไหวได้อย่างอิสระ ภายในศีรษะติดตั้งกล้องสำหรับบันทึกภาพ และกล้องสำหรับควบคุม มันสามารถเคลื่อนที่ไปบริเวณใดก็ได้ของยานอวกาศ ผ่านระบบล้อเลื่อน และการยึดเข้ากับชิ้นส่วนภายในยานอวกาศ
มันเคยถูกนำขึ้นไปปฏิบัติหน้าที่จริงบนกระสวยอวกาศ STS-133 เมื่อปี 2011 ที่ผ่านมา โดยมันสามารถปฏิบัติหน้าที่พื้นฐานอย่างการหยิบจับสิ่งของ และการบังคับควบคุมปุ่มต่างๆ ในยานอวกาศ นับเป็นเวลานานกว่า 15 ปีที่นาซ่าเริ่มต้นพัฒนา จนสามารถปฏิบัติงานจริงได้เป็นผลสำเร็จ
ปัจจุบัน Robonaut อยู่ในช่วงพัฒนาเทคโนโลยีเพื่อเตรียมความพร้อมสำหรับภารกิจในอนาคต ทางนาซ่าวางแผนให้มันเป็นผู้ช่วยสำคัญที่มีความสามารถเทียบเท่ามนุษย์ อย่างการบังคับยานอวกาศ ออกสำรวจร่วมกับมนุษย์ สนับสนุนกิจกรรมทุกอย่างขณะปฏิบัติหน้าที่ในอวกาศ โดยนาซ่าวางแผนให้แล้วเสร็จก่อนภารกิจสำรวจดาวอังคารครั้งใหม่ในปี 2030
Cr.SpokeDark.TV
กิโรโบะ
สำนักงานสำรวจอวกาศญี่ปุ่นส่งหุ่นยนต์ขึ้นสู่อวกาศ โดยใช้จรวดบรรทุกยานขนส่งสินค้าไร้คนบังคับ ที่บรรทุกทั้งหุ่นยนต์ นักบินอวกาศ 1 คน พร้อมด้วยเสบียงและอุปกรณ์ หนักเกือบ 3.5 ตัน ขึ้นจากฐานปล่อยที่ศูนย์อวกาศ ทาเนงะชิมะ จังหวัดโคโงชิมะ และยานขนส่งสลัดตัวออกจากจรวดเพียง 15 นาทีหลังจรวดขึ้นจากฐานปล่อย โดยคาดว่ายานจะเชื่อมต่อกับสถานีอวกาศนานาชาติได้ในวันที่ 9 ส.ค.2556
หุ่นยนต์ที่ถูกส่งขึ้นไปอวกาศมีชื่อว่า กิโรโบะ มันสามารถพูดภาษาญี่ปุ่นได้และจะขึ้นไปบนสถานี อวกาศเพื่อทำงานร่วมกับนักบินอวกาศชาวญี่ปุ่น โคอิจิ วากาตะ ที่จะถูกส่งขึ้นไปถึงสถานีอวกาศในเดือนพ.ย. นอกจากนี้กิโรโบะจะทดสอบการสื่อสารกับหุ่นยนต์คู่แฝดอีกตัวที่ชื่อ มิราตะ ที่อยู่บนโลกด้วย มิราตะไม่ได้ถูกออกแบบมาให้ไปอวกาศได้ แต่เรียนรู้การสนทนาได้
ชื่อของหุ่นยนต์ เป็นคำผสมระหว่าง กิโบะ ในภาษาญี่ปุ่น ที่แปลว่าความหวัง กับคำว่า robot ในภาษาอังกฤษที่แปลว่า หุ่นยนต์ ทั้งกิโรโบะ และมิราตะ ได้รับการพัฒนาจากหลายองค์กร รวมถึง สำนักงานสำรวจอวกาศญี่ปุ่น มหาวิทยาลัยโตเกียว และบริษัทเอกชนหลายแห่ง โดย บริษัทโรโบ้ การาจ และศูนย์วิจัยวิทยาศาสตร์และเทคโนโลยี พัฒนาตัวหุ่นยนต์และระบบการเคลื่อนไหว ขณะที่บริษัทโตโยต้ารับผิดชอบพัฒนาระบบจดจำเสียง และบริษัทเดนสุ ช่วยสร้างเนื้อหาบทสนทนา หุ่นยนต์ทั้งสองจะจดจำเสียง ใบหน้าและอารมณ์ความรู้สึกได้
โครงการส่งกิโรโบะขึ้นไปอวกาศ มีจุดประสงค์เพื่อทดสอบการสื่อสารระหว่างหุ่นยนต์และคนในอวกาศเป็นครั้งแรกในโลกเพื่อดูว่ามันสามารถสนทนากับคนด้วยตัวเองได้มากน้อยแค่ไหน และทดสอบการควบคุมหุ่นยนต์ทางไกลจากโลก โดยหวังว่าความสำเร็จจะเปิดทางให้ส่งหุ่นยนต์ขึ้นไปช่วยนักบินอวกาศปฏิบัติภารกิจในอวกาศในอนาคต แต่ความท้าทายของภารกิจครั้งนี้ คือ หุ่นยนต์จะเคลื่อนไหวและพูดในสภาวะไร้น้ำหนักได้หรือไม่
Cr.oknation.nationtv.tv
“แอสโตรบี”
นาซาได้พัฒนาหุ่นยนต์ทรงลุกบาศก์ขนาดกว้างด้านละ 1 ฟุตจำนวน 3 ตัว เรียกว่าหุ่นยนต์ฝูงผึ้งอวกาศ หรือ “Astrobees” เพื่อส่งขึ้นไปช่วยงานนักบินอวกาศบนสถานีอวกาศนานาชาติ
หุ่นทั้ง 3 ตัวมีชื่อเรียกว่า “ฮันนี่” “บัมเบิล” และ “ควีน” ทั้ง 3 ตัวมีลักษณะเป็นสี่เหลี่ยมลูกบาศก์ ติดตั้งกล้อง จะบบไจโร ไมโครโฟน ลำโพง เซ็นเซอร์ RFID และเซ็นเซอร์อีกหลากหลายชนิด มีแขนกลเล็กๆ และเคลื่อนที่ไปมาในสถานีอวกาศด้วยการใช้ใบพัดเล็กๆที่ติดตั้งไว้รอบตัว
นาซาส่ง “ขาตั้ง” สำหรับให้เจ้า “แอสโตรบี” ใช้พักผ่อนและชาร์จไฟขึ้นไปกับเที่ยวบินส่งสัมภาระของ Northrop Grumman ตั้งแต่เดือนพฤศจิกายนปี 61และส่งหุ่น 2 ตัวแรกคือ “บัมเบิล” และ “ฮันนี” ขึ้นไปกับเที่ยวบินส่งสัมภาระของ Northrop Grumman อีกครั้งในวันที่ 17 เมษายน 62 ที่ผ่านมา ส่วน “ควีน” หุ่นตัวสุดท้ายยังอยู่ในห้องทดลองภาคพื้น รอส่งขึ้นไปในเที่ยวบินหน้า
หุ่น “แอสโตรบี” มีหน้าที่ช่วยงานที่ต้องทำซ้ำๆเช่นการเช็กสต็อกที่ต้องทำประจำเพื่อดูว่าอาหาร หรือสิ่งจำเป็นในการดำรงชีวิตของนักบินอวกาศเหลือมากน้อยเท่าใด โดยมันสามารถนับจำนวนหรือแยกประเภทสิ่งต่างๆด้วยการอ่านรหัสจากสัญญาณ RFID ทีติดตั้งไว้บนวัตถุนั้น นอกจากนี้มันยังมีหน้าที่หลากหลายเช่นคอยฟังเสียงที่ผิดปกติที่อาจเกิดกับตัวสถานีอวกาศ คอยถ่ายภาพหรือรับคำสั้งให้เคลื่อนย้ายสิ่งของต่างๆหรือช่วยเป็นมือไม้ในการหยิบจับหรือช่วยงานทดลองทางวิทยาศาสตร์ต่างๆ
นักวิทยาศาสตร์บนโลกยังสามารถขอใช้เจ้าหุ่นแอสโตรบีในการทดลองทางวิทยาศาสตร์ต่างๆ โดย AI ในตัวมันเองก็จะเรียนรู้ทุกเรื่องราวตั้งแต่การทรงตัวและการเคลื่อนที่ในที่ไร้แรงโน้มถ่วงไปจนถึงเรื่องราวของการช่วยงานต่างๆ และสั่งให้มันกลับไปที่ “ขาตั้ง” เพื่อชาร์จไฟเมื่อกำลังไฟลดต่ำลง รวมทั้งหาที่ยึดเกาะเมื่อไม่ได้ทำงานเพื่อประหยัดไฟฟ้าของใบพัดทรงตัว
หุ่นทั้ง 3 ตัวคือเวอร์ชันแรกๆของหุ่นช่วยงานในยานอวกาศที่ต้องเดินทางระยะไกลในอนาคต
Cr.stem.in.th
King Louie
วิทยาการหุ่นยนต์ที่มหาวิทยาลัยบริกแฮมยัง(BYU) ด้วยการสนับสนุนทางการเงินขององค์การอวกาศนาซ่าและความร่วมมือกับ Pneubotics เริ่มต้นกำลังพัฒนาหุ่นยนต์เป่าลม King Louie (King Louis ซึ่งได้รับการตั้งชื่อตามอุรังอุตังจากหนังสือป่าปี 1967) แทนที่จะใช้โครงสร้างโลหะใช้ถุงลมนิรภัยการควบคุมความดันอากาศอย่างแม่นยำ (จ่ายผ่านคอมเพรสเซอร์) ซึ่งทำให้สามารถเคลื่อนย้ายและควบคุมด้วยมือ เป็นไปได้ว่าในอนาคตเครื่องเหล่านี้จะถูกใช้ในสถานีอวกาศตาม IEEE Spectrum
หุ่นยนต์เป่าลมเหล่านี้มีมากมายประโยชน์ที่จับต้องได้และถูกกว่า การผลิตส่วนใหญ่ทำจากผ้าและยางและง่ายต่อการซ่อมแซม เมื่อเทียบกับหุ่นยนต์อื่น ๆ ส่วนใหญ่จะเบากว่าปกติ หากจำเป็นพวกเขาสามารถทำขนาดกะทัดรัดที่สุด (มีอากาศลดลง) เพื่อไม่ให้ใช้พื้นที่มาก นอกจากนี้แม้จะมี "ความนุ่มนวล" ของพวกเขาพวกเขาสามารถแข็งแกร่งและรวดเร็วโดยไม่คาดคิด บางทีข้อได้เปรียบที่สำคัญที่สุดของพวกเขาคือหุ่นยนต์เป่าลมนั้นปลอดภัยต่อมนุษย์อย่างสิ้นเชิงเพราะไม่ได้ใช้องค์ประกอบโลหะในการออกแบบ
พวกมันสามารถเป็นทางเลือกที่ง่ายและประหยัดสำหรับหุ่นยนต์โลหะหรืออาวุธหุ่นยนต์ในยานพาหนะทุกพื้นที่ แต่ข้อเสียคือความซุ่มซ่ามและความยากลำบากในการจัดการ ชิ้นส่วนที่เคลื่อนไหวของพวกเขาบิดและงอในแบบที่ยากต่อการทำแบบจำลองและในแต่ละครั้งที่หุ่นยนต์เคลื่อนที่และพองตัวอีกครั้งโครงสร้างภายในและดังนั้นพฤติกรรมของข้อต่อจึงแตกต่าง
Cr.vpchothuegoldenking
วัลคีรี (Valkyrie)
นาซาเตรียมทดสอบประสิทธิภาพของหุ่นยนต์นักบินอวกาศ เพื่อพัฒนาต่อยอดไปสู่การใช้หุ่นยนต์ฮิวแมนนอยด์สำรวจอวกาศ
องค์การบริหารการบินและอวกาศแห่งชาติของสหรัฐ หรือ นาซา เตรียมทดสอบประสิทธิภาพของ วัลคีรี (Valkyrie) หุ่นยนต์เหล็กฮิวแมนนอยด์ สูง 6 ฟุต น้ำหนักประมาณ 130 กก. ที่ถูกพัฒนาขึ้นเป็นหุ่นยนต์นักบินอวกาศ ตั้งแต่ปี 2015 โดยนาซาตั้งเป้าจะใช้มันเป็นหุ่นยนต์รุ่นบุกเบิกในการสำรวจดาวอังคาร ก่อนที่มนุษย์จะขึ้นไปสำรวจจริง
โดยในช่วงกลางปีนี้ นาซาจะจัดการแข่งขัน เพื่อให้มหาวิทยาลัยและทีมวิจัยกว่า 20 ทีม แข่งขันกันทดสอบประสิทธิภาพของเจ้าวัลคีรี ในสภาพแวดล้อมที่ใกล้เคียงกับดาวอังคาร ก่อนจะนำผลที่ได้ไปพัฒนาต่อ โดยมีรางวัลสูงสุดมูลค่ากว่า 1 ล้านดอลลาร์สหรัฐ หรือประมาณ 35 ล้านบาท
Cr.pptvhd36.
ภาพยนตร์ที่เกี่ยวกับหุ่นยนตร์อวกาศ
เรื่องราวมีฉากเป็นอนาคตกันใกล้ที่กองทัพหุ่นยนต์จากต่างดาวเข้ามายึดครองโลก แล้วเด็กหนุ่มที่กล้าหาญ (แม็คออลิฟ) พบวิธีการที่จะควบคุมหุ่นยนต์จากอุปกรณ์ส่งสัญญาณต่างดาวที่คอของเขา และอาจกลายเป็นความหวังเดียวที่จะช่วยมนุษย์โลก
อาร์ทูดีทู (R2-D2) เป็นหุ่นยนต์ในเรื่อง สตาร์ วอร์ส เป็นตัวละครเพียงตัวเดียวที่มีบทบาทในภาพยนตร์สตาร์วอร์สทั้งหกภาคโดยไม่มีการเปลี่ยนแปลงลักษณะหรือแม้แต่เสียงพูด ด้วยความที่มีอุปกรณ์ต่างๆ บรรจุอยู่มากมาย อาร์ทูดีทู จึงเป็นได้ทั้งช่างเครื่องยานอวกาศที่เก่งฉกาจและผู้เชี่ยวชาญการเชื่อมต่อกับคอมพิวเตอร์ฝีมือล้ำเลิศ เป็นเครื่องมือที่ช่วยให้รอดจากสถานการณ์คับขันได้ ตัวอาร์ทูดีทูและคู่หูซีทรีพีโอ ได้รับการยอมรับว่าเป็นหนึ่งในคู่หูที่มีชื่อเสียงที่สุดตลอดกาลในโลกภาพยนตร์
Cr.majorcineplex