สวัสดีครับ
ผมกำลังเขียนโปรอแกรมเครื่องที่มีการทำงานดังนี้
มีชิ้นงาน PCB ตามแบบในรูป
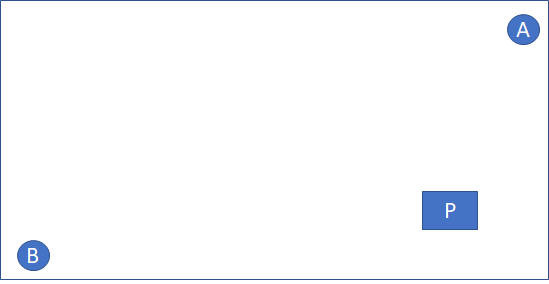
จุด A,B เป็นจุด referent ของ PCB และมีจุด P เป็นจุดที่ผมต้องสั่ง Robot ให้วิ่งไปยังจุด P
เริ่มแรกเมื่อมีชิ้นงาน PCBเข้ามา ผมจะสั่งให้ robot ที่ติดกล้องไปอ่านค่าจากจุด refer A,B ว่าอยู่ตรงไหน ของพื้นที่ X,Y ของrobot
(X,Y ของจุด referent A,B ผมสามารถคำนวนได้จากกล้องและ encoder ของ robot) เมื่อผมได้ X,Y ของจุด A,B แล้ว ผมจะต้องคำนวนหาว่าจุด P อยู่ตรงไหน เอียงเป็นมุมเท่าไร (จุด A,B,P เป็นจุดที่ผมสามารถอ่านได้จาก gerber file ซึ่งเป็นจุดในโปรแกรม ไม่ใช่จุดที่อ่านได้จากกล้อง)
คำถามคือ
1. มีวิธีใดบ้างที่จะคำนวนหา จุด P จากจุด referent A,B ที่อ่านได้จากกล้อง
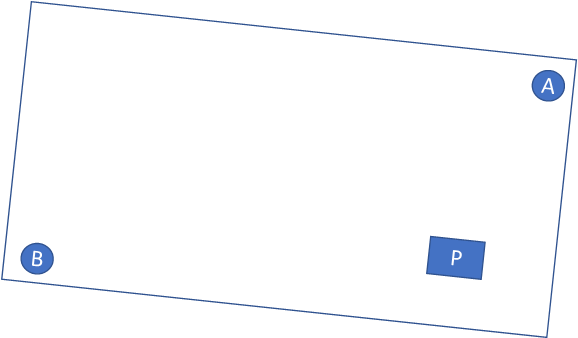
2. ถ้า PCB มีอาการเอียง เราสามารถ คำหามุมที่เอียงจากจุด referent A,B แล้วคำนวนหาจุด P ได้หรือไม่ครับ

การคำนวนหาจุด referent
ผมกำลังเขียนโปรอแกรมเครื่องที่มีการทำงานดังนี้
มีชิ้นงาน PCB ตามแบบในรูป
จุด A,B เป็นจุด referent ของ PCB และมีจุด P เป็นจุดที่ผมต้องสั่ง Robot ให้วิ่งไปยังจุด P
เริ่มแรกเมื่อมีชิ้นงาน PCBเข้ามา ผมจะสั่งให้ robot ที่ติดกล้องไปอ่านค่าจากจุด refer A,B ว่าอยู่ตรงไหน ของพื้นที่ X,Y ของrobot
(X,Y ของจุด referent A,B ผมสามารถคำนวนได้จากกล้องและ encoder ของ robot) เมื่อผมได้ X,Y ของจุด A,B แล้ว ผมจะต้องคำนวนหาว่าจุด P อยู่ตรงไหน เอียงเป็นมุมเท่าไร (จุด A,B,P เป็นจุดที่ผมสามารถอ่านได้จาก gerber file ซึ่งเป็นจุดในโปรแกรม ไม่ใช่จุดที่อ่านได้จากกล้อง)
คำถามคือ
1. มีวิธีใดบ้างที่จะคำนวนหา จุด P จากจุด referent A,B ที่อ่านได้จากกล้อง
2. ถ้า PCB มีอาการเอียง เราสามารถ คำหามุมที่เอียงจากจุด referent A,B แล้วคำนวนหาจุด P ได้หรือไม่ครับ