สวัสดีครับ กระทู้นี่ ผมจะแชร์ความรู้เกี่ยวกับ Calibration และ Stacking ของภาพถ่ายทางดาราศาสตร์กัน
 วัตถุประสงค์ของการ Calibration and Stacking ภาพถ่าย
วัตถุประสงค์ของการ Calibration and Stacking ภาพถ่าย
เพื่อให้ภาพถ่ายออกมามีคุณภาพที่ดี
 keyword ของการ Calibration and Stacking ภาพถ่าย
keyword ของการ Calibration and Stacking ภาพถ่าย
การ Calibration คือ การลดหรือกำจัดสัญญาณรบกวนต่าง ๆ ออกจากภาพ
การ Stacking คือ การเพิ่ม SNR ของภาพ
โดยปกติภาพถ่ายที่ได้ จะมีสัญญาณของภาพวัตถุที่ต้องการ(Signal) และสัญญาณรบกวนต่าง ๆ (Noise) รวมกันอยู่ ภาพที่มีแต่ Signal อย่างเดียวก็ไม่ดี ภาพที่มี Noise มากก็ไม่ดี ดังนั้นภาพที่ควรจะเป็นภาพที่ให้รายละเอียด Signal ของวัตถุได้ดีและมี Noise ไม่มากจะเกินไปจนไม่มีรายละเอียดของภาพ
 การ Calibration ภาพ
การ Calibration ภาพ
การ Calibration ภาพ คือการลดหรือกำจัดสัญญาณรบกวน ( Noise) ก่อนที่จะกำจัดหรือลด Noise จะต้องมารู้จัก Noise กันก่อน
สัญญาณรบกวน (Noise)
สัญญาณรบกวน คือ สัญญาณที่เกิดขึ้นในภาพทำให้เห็นความไม่สม่ำเสมอของความสว่างหรือสี ที่เกิดจากการถ่ายภาพด้วยความไวแสงสูงๆ หรือการใช้ระยะเวลาในการถ่ายภาพนานๆ หรืออุณหภูมิและตัวอุปกรณ์รับภาพ เป็นต้น ปัจจัยเหล่านี้ทำให้เกิด Noiseในการถ่ายภาพทางดาราศาสตร์ได้
Noise แบ่งตามรูปแบบการเกิดขึ้นในภาพถ่ายแบบดิจิตอล มีด้วยกัน 3 รูปแบบหลัก ๆ คือ ดังภาพที่ 1
1. Fixes Pattern Noise เป็นสัญญาณรบกวนที่เกิดจากใช้เวลานานในการถ่ายภาพ และจึงทำให้อุณหภูมิของเซนเซอร์สูงขึ้น ที่เห็นได้ชัดเจน เช่น Hot Pixel เป็นต้น
2. Random Noise เป็นสัญญาณรบกวนที่ไม่มีรูปแบบเฉพาะ เกิดได้ทุกช่วงของการถ่ายภาพและเกิดขึ้นมากเมื่อปรับใช้ความไวแสงสูง ( ISO สูง )
3. Banding Noise เป็นสัญญาณรบกวนที่เกิดการอ่านข้อมูลจากเซ็นเซอร์ภาพไม่สมบูรณ์
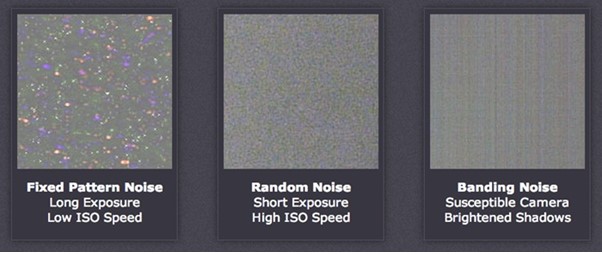
ภาพที่ 1 แสดง รูปแบบของสัญญาณรบกวน
ที่มา :
http://www.manager.co.th/Around/ViewNews.aspx?NewsID=9560000086131
Noise แบ่งตามลักษณะ จะมี 2 รูปแบบหลัก ๆ คือ Chrominance Noise เป็น สัญญาณรบกวนที่มีเม็ดสีแตกต่างไปจากภาพจริง จะพบสัญญาณรบกวนนี้ได้เมื่อใช้เวลานานในการถ่ายภาพ และ Luminance Noise เป็นสัญญาณรบกวนที่มีความสว่างของพิกเซลไม่เท่ากัน โดยมีลักษณะเป็นสีเทาหรือขาวคล้ายเม็ดสีบนฟิล์ม ซึ่งจะพบสัญญาณรบกวนในลักษณะนี้ เมื่อใช้ความไวแสงสูง ดังภาพที่ 2
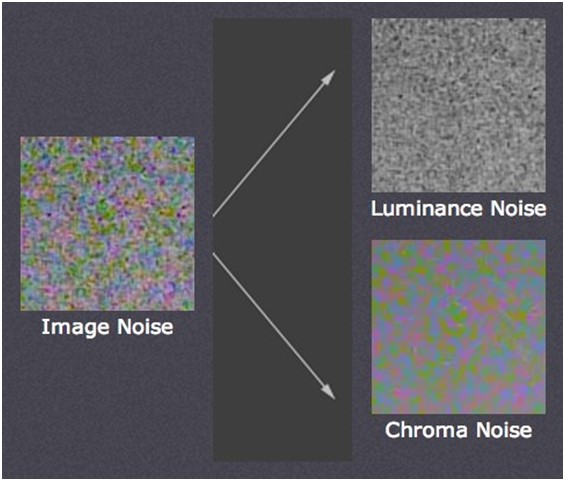
ภาพที 2 แสดง ลักษณะของสัญญาณรบกวน
ที่มา :
http://www.manager.co.th/Around/ViewNews.aspx?NewsID=9560000086131
Noise ที่เกิดจากแสงผ่านกระจกหรือเลนส์เข้ามากระทบกับเซ็นเซอร์ภาพไม่สม่ำเสมอกัน ทำให้มีความสว่างไม่เท่ากันโดยภาพจะสว่างบริเวณตรงกลางส่วนขอบภาพความสว่างจะลดลง ปัญหานี้เรียกว่า Vignette
นอกจากนี้ Noise ที่เกิดจากแสงถูกปิดกั้นจากฝุ่นผงที่เกาะหน้ากระจกหรือเลนส์ หรือเซ็นเซอร์ ก็จะทำให้ภาพมีความสว่างไม่สม่ำเสมอกันได้ ที่เรียกว่า dust and scratches ดังภาพที่ 3
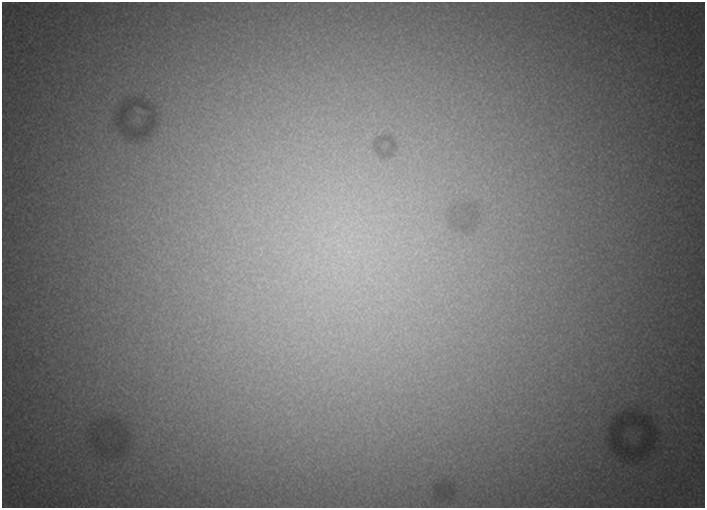
ภาพที 3 แสดง ปัญหา Vignette และ dust and scratches
http://www.astropix.it/appunti/immagini/ccd-11.jpg
ลองมาดูกระบวนการ Calibration Image อย่างง่าย
ก่อนจะทำการ Calibrated ภาพ จะต้องมีภาพสำหรับนำมาเทียบหรืออ้างอิง ประเภทของภาพที่จะนำ Calibrated ภาพ ได้แก่
Light Frame : LI คือ ภาพถ่ายวัตถุที่เราสนใจ เช่น ภาพเนบิวลา กาแล๊กซี่ หรือกระจุกดาวต่าง ๆ ซึ่งภาพที่ถ่ายได้นี้จะมีสัญญาณรบกวนต่าง ๆ เข้ามารวมด้วย
Dark Frame : DI คือ ภาพถ่ายโดยการปิดหน้ากล้อง เพื่อไม่ให้แสงเข้ามายังเซนเซอร์ และตั้งค่าเทคนิคการถ่ายภาพแบบเดียวกับ Light Frame ภาพถ่าย Dark Frame นี้จะนำไปลดสัญญาณรบกวนประเภท Fixes Pattern Noise
Flat Frame : FI คือ ภาพถ่ายพื้นหลังหรือฉากที่มีแสงสว่างสม่ำเสมอทั่วพื้นที่ โดยใช้เทคนิคที่ไม่จำเป็นต้องเท่ากับ Light Frame แต่ค่า ISO จะเท่ากัน ภาพถ่าย Flat Frame นี้จะนำไปปรับค่าอันเนื่องมากจากตัวเลนส์ที่มีการหักเหและกระจายแสงตกกระทบเซนเซอร์ไม่เท่ากัน โดยปัญหาที่เห็นได้ชัดเจน คือ ภาพจะสว่างตรงกลางขอบภาพจะจางหรือมืด เรียกว่า Vignetting
Flat Dark : FD คือ ภาพถ่ายโดยการปิดหน้ากล้อง เพื่อไม่ให้แสงเข้ามายังเซนเซอร์ และตั้งค่าเทคนิคการถ่ายภาพแบบเดียวกับ Flat Frame ภาพถ่าย Dark Frame นี้จะนำลดสัญญาณรบกวนประเภท Fixes Pattern Noise ของ Flat Frame
Bias Frame : BF คือ ภาพถ่ายโดยการปิดหน้ากล้อง เพื่อไม่ให้แสงเข้ามายังเซนเซอร์ ตั้งค่าเทคนิคการถ่ายภาพแบบเดียวกับ Light Frame แต่เลือก Speed Shutter น้อยที่สุดเท่าที่ทำได้ ภาพถ่าย Bias Frame นี้จะนำลดสัญญาณรบกวนประเภท Banding Noise
Calibrated Image : CI คือ ภาพถ่ายทางดาราศาสตร์ที่ผ่านการประมวลผลแล้ว
ขั้นตอนการ Calibrated ภาพ
การอธิบายนี้ ขออธิบายโดยใช้การคำนวนอย่างง่ายด้วยวิธี Pixel by Pixel โดยกำหนดให้ค่าพิกเซลน้อยแสดงถึงสัญญาณภาพน้อย ค่าพิกเซลน้อยแสดงถึงสัญญาณภาพมาก
1. ถ่ายภาพ Light Frame สมมติเป็นภาพที่มีค่าในแต่ละพิกเซลได้ดังภาพที่ 4

จากภาพที่ 4 เมื่อสังเกตค่าในแต่ละพิกเซลของภาพจะเห็นว่า
โดยรวมของภาพแล้ว ค่าพิกเซลบริเวณตรงกลางมีค่ามากและค่าค่อย ๆ ลดลงยังขอบที่มีค่าพิกเซลประมาณ 500 กว่า แสดงว่าภาพนี้สว่างตรงกลางแต่ขอบภาพมืด เกิดปัญหา Vignetting
ค่าพิกเซลบริเวณเฉพาะตรงกลาง ( สีเหลี่ยมสีเขียว) มีค่ามาก คาดว่าบริเวณนั้นเป็นภาพของวัตถุที่ให้แสงมาก แต่มี 1 พิกเซลที่มีค่ามากกว่าพิกเซลข้างเคียงนั้นเป็นอย่างมาก ( วงสีแดง) คาดว่าน่าจะเกิดNoise ที่พิกเซลนั้น
บริเวณขอบรอบภาพ จะเห็นค่าพิกเซลอยู่ในช่วงตั้งแต่ 500 แต่ไม่ถึง 600 แต่มี 1 พิกเซลที่มีค่าเป็น 10500 มากกว่าพิกเซลข้างเคียงนั้นเป็นอย่างมาก (วงสีแดง) คาดว่าน่าจะเกิด Noise ที่พิกเซลนั้น
นอกจากนี้ ยังมีค่าพิกเซลที่ประมาณ 70-150 (วงสีฟ้า) คาดว่าน่าจะเกิดจากรอยขีดข่วนหรือเม็ดฝุ่นติดหน้ากระจกหรือเลนส์ทำให้บดบังแสง ก็เป็น Noise ที่พิกเซลนั้น
2. ถ่ายภาพ Dark Frame โดยใช้เทคนิคและโฟกัสการถ่ายภาพเดียวกับ Light Frame แต่ปิดไม่ให้แสงเข้าไปยังเซ็นเซอร์รับภาพ สมมติเป็นภาพที่มีค่าในแต่ละพิกเซลได้ดังภาพที่ 5
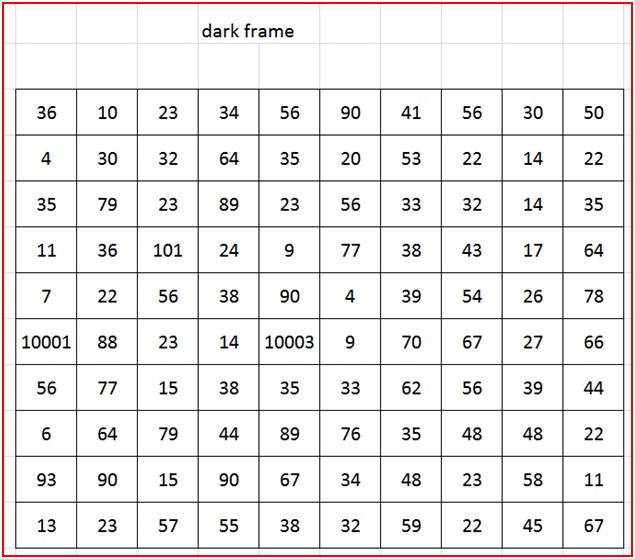
จากภาพที่ 5 เมื่อสังเกตค่าพิกเซลเฉลี่ยไม่น่าเกิน 100 แต่มี 2 พิกเซลที่มีค่ามากผิดปกติ คาดว่าพิกเซลนั้นเกิด Hot Pixel ซึ่งเป็นสัญญาณรบกวนประเภทหนึ่ง
3. ถ่ายภาพ Bias Frame โดยใช้เทคนิคและโฟกัสการถ่ายภาพเดียวกับ Light Frame ปิดไม่ให้แสงเข้าไปยังเซ็นเซอร์รับภาพเหมือน Dark Frame แต่ตั้งค่า Speed Shutter เร็วที่สุด เท่าที่อุปกรณ์จะทำได้ เช่น 1/4000 หรือ 1/8000 สมมติเป็นภาพที่มีค่าในแต่ละพิกเซลได้ดังภาพที่ 6
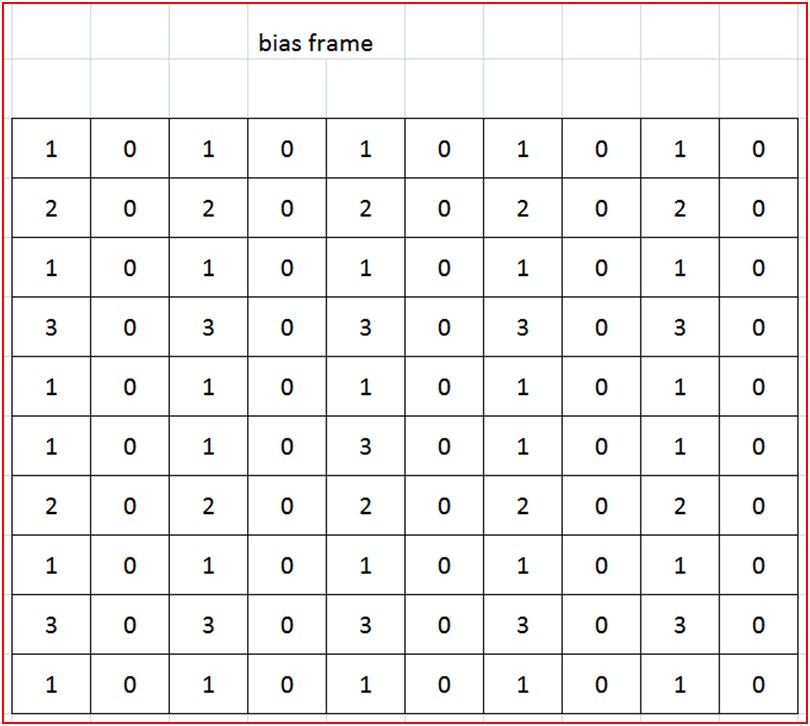
จากภาพที่ 6 สังเกตว่ามีค่าพิกเซลไม่เป็น 0 และเป็นแถบในแนวตั้ง คาดว่าเป็นสัญญาณรบกวนที่เกิดจากเซ็นเซอร์แปรสัญญาณไม่สมบูรณ์
4. ถ่ายภาพ Flat Frame โดยใช้เทคนิคและโฟกัสการถ่ายภาพเดียวกับ Light Frame แต่ถ่ายภาพพื้นผิวที่มีความสว่างสม่ำเสมอกันและไม่จำเป็นต้องใช้ Speed Shutter เร็วที่สุดหรือเท่า Light Frame สมมติเป็นภาพที่มีค่าในแต่ละพิกเซลได้ดังภาพที่ 7
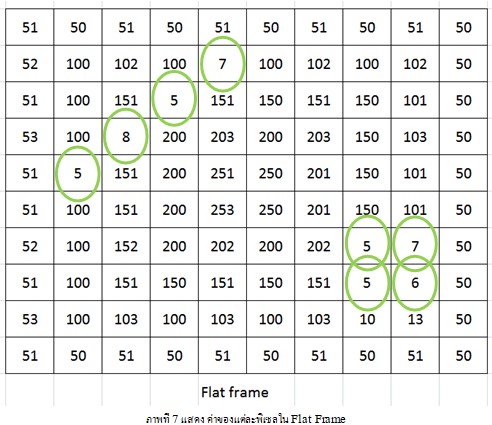
จากภาพที่ 7 เมื่อสังเกตค่าพิกเซลจะมากบริเวณตรงกลาง และขอบภาพจะมีค่าพิกเซลน้อยลง แต่มีบางพิกเซลที่มีค่าไม่ถึง 10 (วงสีเขียว) น่าจะเกิดจากผิวเลนส์หรือกระจกมีรอยขีดข่วนหรือฝุ่นผงติดอยู่
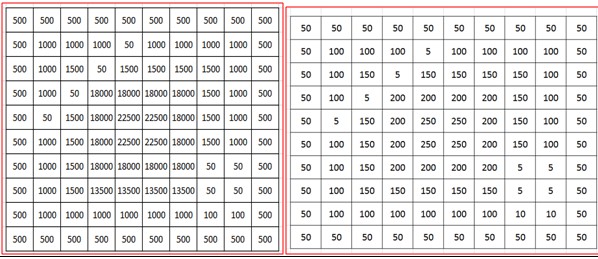
5. นำค่าพิกเซลในภาพ Flat Frame มาลบกับค่าพิกเซลในภาพ Bias Frame แบบ Pixel by Pixel คือ พิกเซลตำแหน่งเดียวกันนำค่ามาลบกัน เพื่อกำจัด Noise แบบแถบของ Flat Frame ดังภาพที่ 8
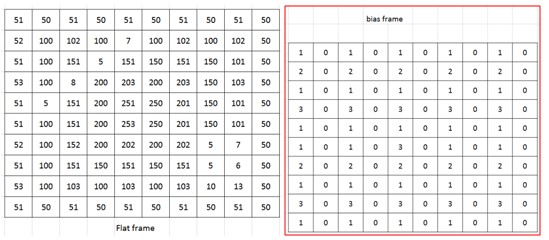

ภาพที่ได้ จากการนำ Flat Frame – Bias Frame นี้ เรียกว่า Master Flat Frame
6. นำค่าพิกเซลในภาพ Dark Frame มาลบกับค่าพิกเซลในภาพ Bias Frame แบบ Pixel by Pixel คือ พิกเซลตำแหน่งเดียวกันนำค่ามาลบกัน เพื่อกำจัด Noise แบบแถบ ของ Dark Frame ดังภาพที่ 9
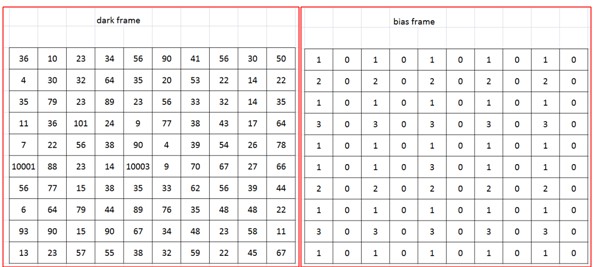
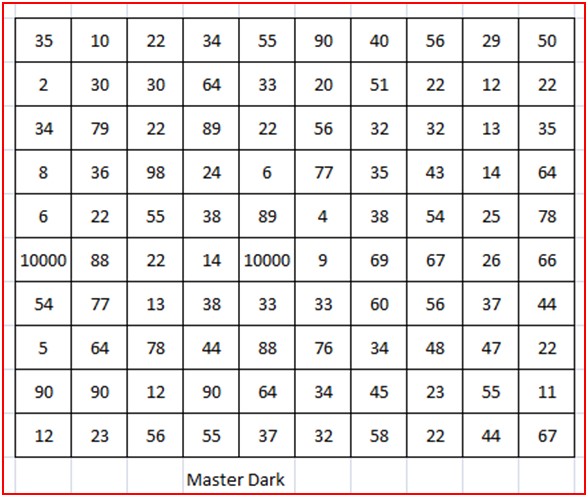
ภาพที่ได้ จากการนำ Dark Frame – Bias Frame นี้ เรียกว่า Master Dark Frame
7. นำค่าพิกเซลในภาพ Light Frame มาลบกับค่าพิกเซลในภาพ Master Dark Frame และ Bias Frame แบบ Pixel by Pixel คือ พิกเซลตำแหน่งเดียวกันนำค่ามาลบกัน เพื่อกำจัด Noise แบบแถบ ของ Light Frame จากการลบด้วย Bias Frame และกำจัด Hot Pixel จากการลบด้วย Master dark Frame ดังภาพที่ 10
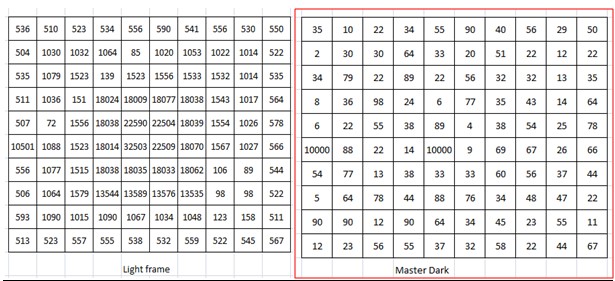
จากภาพที่ 10 จะเห็นได้ว่า Hot Pixel ได้ถูกกำจัดออกไปแล้วในพิกเซลตำแหน่งวงกลมแดง แต่จากค่าพิกเซลที่เห็นทั้งภาพ พบว่า ภาพยังสว่างตรงกลางและจางลงที่ขอบภาพ (Vignetting) อีกทั้งตำแหน่งพิกเซลในตำแหน่งสีฟ้าและสีเขียวยังมีค่าน้อยกว่าพิกเซลข้างเคียง ซึ่งเกิดจาก dust and scratches
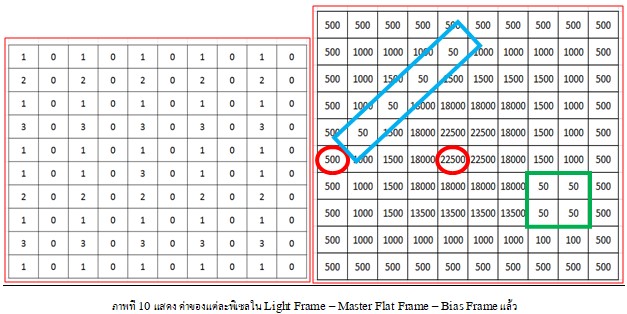
8. นำค่าพิกเซลในภาพที่ได้จาก Light Frame – Master Flat Frame – Bias Frame แล้ว มาหารกับค่าพิกเซลในภาพ Master Flat Frame แบบ Pixel by Pixel คือ พิกเซลตำแหน่งเดียวกันนำค่ามาหารกัน เพื่อกำจัด Vignetting และ dust and scratches ของ Light Frame ได้เป็น Calibrated Frame ดังภาพที่ 11
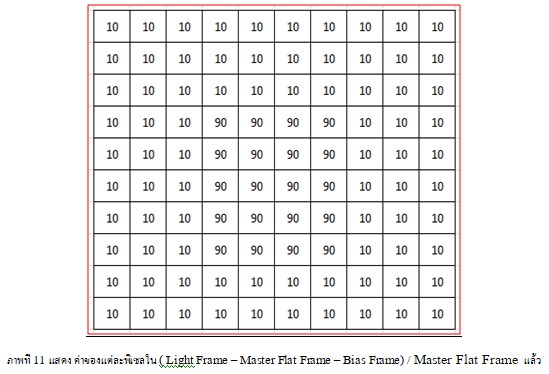
จากภาพที่ 11 จะเห็นได้ว่า ค่าพิกเซลบริเวณพื้นหลังมีค่าเท่ากับ 10 เท่ากันหมด และบริเวณที่เป็นภาพของวัตถุมีค่าเป็น 90 เท่ากัน ภาพที่ได้หลังจากกระบวนการ Calibrated นี้ เรียกว่า Calibration Frame พร้อมที่จะนำไปเข้าสู่กระบวนการ Processing ภาพ อย่างอื่นต่อไป
 การ Stacking ภาพ
การ Stacking ภาพ
การวัดสัญญาณภาพถ่ายหรือการเทียบคุณภาพของภาพที่ได้สามารถวัดได้จากอัตราส่วนระหว่างสัญญาณของภาพ(Signal) ต่อสัญญาณรบกวนต่าง ๆ (Noise) หรือเรียกสั้นว่า SNR ย่อมาจาก Signal Noise Ratio
หากใช้คณิตศาสตร์อย่างง่ายมาอธิบายจะได้ว่า สัญญาณรบกวน(Noise) คือความแปรปรวนของสัญญาณภาพ ดังนั้น
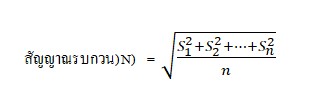
โดยที่ n คือ จำนวนภาพ
S_n คือ สัญญาณภาพที่ n
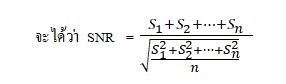
จาก SNR = (สัญญาณภาพ (S))/(สัญญาณรบกวน(N))
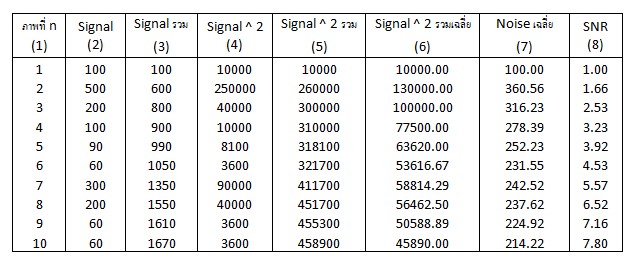
จากตารางข้างบนนี้ สามารถอธิบายได้ตามขั้นตอนดังนี้
1. สมมติว่า ถ่ายภาพทั้งหมด 10 ภาพ (1) และวัดค่าสัญญาณภาพของแต่ละภาพได้ตามช่อง Signal (2)
2. นำค่า Signal (2) แต่ละภาพมารวมกันตามจำนวนภาพ จะได้ตามช่อง Signal รวม(3)
3. เริ่มหาค่า Noise โดยนำค่า Signal ของแต่ละภาพมายกกำลัง 2 ได้ตามช่อง Signal ^ 2 (4)
4. นำค่า Signal ^ 2 (4) แต่ละภาพมารวมกันตามจำนวนภาพ จะได้ตามช่อง Signal ^ 2 รวม (5)
5. นำค่า Signal ^ 2 รวม (5) มาหาค่าเฉลี่ยโดยหารด้วยจำนวนภาพ (n) จะได้ตามช่อง Signal ^ 2 รวมเฉลี่ย (6)
6. หากรากที่สองของค่า Signal ^ 2 รวมเฉลี่ย (6) จะได้เป็นค่า Noise เฉลี่ย ตามช่อง Noise เฉลี่ย (7)
7. นำ Signal รวม(3) มาหาร Noise เฉลี่ย (7) ได้เป็น SNR (8)

กว่าจะได้ภาพดวงดาวที่สวยงาม....มันไม่ง่ายอย่างที่คิด
เพื่อให้ภาพถ่ายออกมามีคุณภาพที่ดี
การ Calibration คือ การลดหรือกำจัดสัญญาณรบกวนต่าง ๆ ออกจากภาพ
การ Stacking คือ การเพิ่ม SNR ของภาพ
โดยปกติภาพถ่ายที่ได้ จะมีสัญญาณของภาพวัตถุที่ต้องการ(Signal) และสัญญาณรบกวนต่าง ๆ (Noise) รวมกันอยู่ ภาพที่มีแต่ Signal อย่างเดียวก็ไม่ดี ภาพที่มี Noise มากก็ไม่ดี ดังนั้นภาพที่ควรจะเป็นภาพที่ให้รายละเอียด Signal ของวัตถุได้ดีและมี Noise ไม่มากจะเกินไปจนไม่มีรายละเอียดของภาพ
การ Calibration ภาพ คือการลดหรือกำจัดสัญญาณรบกวน ( Noise) ก่อนที่จะกำจัดหรือลด Noise จะต้องมารู้จัก Noise กันก่อน
สัญญาณรบกวน (Noise)
สัญญาณรบกวน คือ สัญญาณที่เกิดขึ้นในภาพทำให้เห็นความไม่สม่ำเสมอของความสว่างหรือสี ที่เกิดจากการถ่ายภาพด้วยความไวแสงสูงๆ หรือการใช้ระยะเวลาในการถ่ายภาพนานๆ หรืออุณหภูมิและตัวอุปกรณ์รับภาพ เป็นต้น ปัจจัยเหล่านี้ทำให้เกิด Noiseในการถ่ายภาพทางดาราศาสตร์ได้
Noise แบ่งตามรูปแบบการเกิดขึ้นในภาพถ่ายแบบดิจิตอล มีด้วยกัน 3 รูปแบบหลัก ๆ คือ ดังภาพที่ 1
1. Fixes Pattern Noise เป็นสัญญาณรบกวนที่เกิดจากใช้เวลานานในการถ่ายภาพ และจึงทำให้อุณหภูมิของเซนเซอร์สูงขึ้น ที่เห็นได้ชัดเจน เช่น Hot Pixel เป็นต้น
2. Random Noise เป็นสัญญาณรบกวนที่ไม่มีรูปแบบเฉพาะ เกิดได้ทุกช่วงของการถ่ายภาพและเกิดขึ้นมากเมื่อปรับใช้ความไวแสงสูง ( ISO สูง )
3. Banding Noise เป็นสัญญาณรบกวนที่เกิดการอ่านข้อมูลจากเซ็นเซอร์ภาพไม่สมบูรณ์
ภาพที่ 1 แสดง รูปแบบของสัญญาณรบกวน
ที่มา : http://www.manager.co.th/Around/ViewNews.aspx?NewsID=9560000086131
Noise แบ่งตามลักษณะ จะมี 2 รูปแบบหลัก ๆ คือ Chrominance Noise เป็น สัญญาณรบกวนที่มีเม็ดสีแตกต่างไปจากภาพจริง จะพบสัญญาณรบกวนนี้ได้เมื่อใช้เวลานานในการถ่ายภาพ และ Luminance Noise เป็นสัญญาณรบกวนที่มีความสว่างของพิกเซลไม่เท่ากัน โดยมีลักษณะเป็นสีเทาหรือขาวคล้ายเม็ดสีบนฟิล์ม ซึ่งจะพบสัญญาณรบกวนในลักษณะนี้ เมื่อใช้ความไวแสงสูง ดังภาพที่ 2
ภาพที 2 แสดง ลักษณะของสัญญาณรบกวน
ที่มา : http://www.manager.co.th/Around/ViewNews.aspx?NewsID=9560000086131
Noise ที่เกิดจากแสงผ่านกระจกหรือเลนส์เข้ามากระทบกับเซ็นเซอร์ภาพไม่สม่ำเสมอกัน ทำให้มีความสว่างไม่เท่ากันโดยภาพจะสว่างบริเวณตรงกลางส่วนขอบภาพความสว่างจะลดลง ปัญหานี้เรียกว่า Vignette
นอกจากนี้ Noise ที่เกิดจากแสงถูกปิดกั้นจากฝุ่นผงที่เกาะหน้ากระจกหรือเลนส์ หรือเซ็นเซอร์ ก็จะทำให้ภาพมีความสว่างไม่สม่ำเสมอกันได้ ที่เรียกว่า dust and scratches ดังภาพที่ 3
ภาพที 3 แสดง ปัญหา Vignette และ dust and scratches
http://www.astropix.it/appunti/immagini/ccd-11.jpg
ลองมาดูกระบวนการ Calibration Image อย่างง่าย
ก่อนจะทำการ Calibrated ภาพ จะต้องมีภาพสำหรับนำมาเทียบหรืออ้างอิง ประเภทของภาพที่จะนำ Calibrated ภาพ ได้แก่
Light Frame : LI คือ ภาพถ่ายวัตถุที่เราสนใจ เช่น ภาพเนบิวลา กาแล๊กซี่ หรือกระจุกดาวต่าง ๆ ซึ่งภาพที่ถ่ายได้นี้จะมีสัญญาณรบกวนต่าง ๆ เข้ามารวมด้วย
Dark Frame : DI คือ ภาพถ่ายโดยการปิดหน้ากล้อง เพื่อไม่ให้แสงเข้ามายังเซนเซอร์ และตั้งค่าเทคนิคการถ่ายภาพแบบเดียวกับ Light Frame ภาพถ่าย Dark Frame นี้จะนำไปลดสัญญาณรบกวนประเภท Fixes Pattern Noise
Flat Frame : FI คือ ภาพถ่ายพื้นหลังหรือฉากที่มีแสงสว่างสม่ำเสมอทั่วพื้นที่ โดยใช้เทคนิคที่ไม่จำเป็นต้องเท่ากับ Light Frame แต่ค่า ISO จะเท่ากัน ภาพถ่าย Flat Frame นี้จะนำไปปรับค่าอันเนื่องมากจากตัวเลนส์ที่มีการหักเหและกระจายแสงตกกระทบเซนเซอร์ไม่เท่ากัน โดยปัญหาที่เห็นได้ชัดเจน คือ ภาพจะสว่างตรงกลางขอบภาพจะจางหรือมืด เรียกว่า Vignetting
Flat Dark : FD คือ ภาพถ่ายโดยการปิดหน้ากล้อง เพื่อไม่ให้แสงเข้ามายังเซนเซอร์ และตั้งค่าเทคนิคการถ่ายภาพแบบเดียวกับ Flat Frame ภาพถ่าย Dark Frame นี้จะนำลดสัญญาณรบกวนประเภท Fixes Pattern Noise ของ Flat Frame
Bias Frame : BF คือ ภาพถ่ายโดยการปิดหน้ากล้อง เพื่อไม่ให้แสงเข้ามายังเซนเซอร์ ตั้งค่าเทคนิคการถ่ายภาพแบบเดียวกับ Light Frame แต่เลือก Speed Shutter น้อยที่สุดเท่าที่ทำได้ ภาพถ่าย Bias Frame นี้จะนำลดสัญญาณรบกวนประเภท Banding Noise
Calibrated Image : CI คือ ภาพถ่ายทางดาราศาสตร์ที่ผ่านการประมวลผลแล้ว
ขั้นตอนการ Calibrated ภาพ
การอธิบายนี้ ขออธิบายโดยใช้การคำนวนอย่างง่ายด้วยวิธี Pixel by Pixel โดยกำหนดให้ค่าพิกเซลน้อยแสดงถึงสัญญาณภาพน้อย ค่าพิกเซลน้อยแสดงถึงสัญญาณภาพมาก
1. ถ่ายภาพ Light Frame สมมติเป็นภาพที่มีค่าในแต่ละพิกเซลได้ดังภาพที่ 4
จากภาพที่ 4 เมื่อสังเกตค่าในแต่ละพิกเซลของภาพจะเห็นว่า
โดยรวมของภาพแล้ว ค่าพิกเซลบริเวณตรงกลางมีค่ามากและค่าค่อย ๆ ลดลงยังขอบที่มีค่าพิกเซลประมาณ 500 กว่า แสดงว่าภาพนี้สว่างตรงกลางแต่ขอบภาพมืด เกิดปัญหา Vignetting
ค่าพิกเซลบริเวณเฉพาะตรงกลาง ( สีเหลี่ยมสีเขียว) มีค่ามาก คาดว่าบริเวณนั้นเป็นภาพของวัตถุที่ให้แสงมาก แต่มี 1 พิกเซลที่มีค่ามากกว่าพิกเซลข้างเคียงนั้นเป็นอย่างมาก ( วงสีแดง) คาดว่าน่าจะเกิดNoise ที่พิกเซลนั้น
บริเวณขอบรอบภาพ จะเห็นค่าพิกเซลอยู่ในช่วงตั้งแต่ 500 แต่ไม่ถึง 600 แต่มี 1 พิกเซลที่มีค่าเป็น 10500 มากกว่าพิกเซลข้างเคียงนั้นเป็นอย่างมาก (วงสีแดง) คาดว่าน่าจะเกิด Noise ที่พิกเซลนั้น
นอกจากนี้ ยังมีค่าพิกเซลที่ประมาณ 70-150 (วงสีฟ้า) คาดว่าน่าจะเกิดจากรอยขีดข่วนหรือเม็ดฝุ่นติดหน้ากระจกหรือเลนส์ทำให้บดบังแสง ก็เป็น Noise ที่พิกเซลนั้น
2. ถ่ายภาพ Dark Frame โดยใช้เทคนิคและโฟกัสการถ่ายภาพเดียวกับ Light Frame แต่ปิดไม่ให้แสงเข้าไปยังเซ็นเซอร์รับภาพ สมมติเป็นภาพที่มีค่าในแต่ละพิกเซลได้ดังภาพที่ 5
จากภาพที่ 5 เมื่อสังเกตค่าพิกเซลเฉลี่ยไม่น่าเกิน 100 แต่มี 2 พิกเซลที่มีค่ามากผิดปกติ คาดว่าพิกเซลนั้นเกิด Hot Pixel ซึ่งเป็นสัญญาณรบกวนประเภทหนึ่ง
3. ถ่ายภาพ Bias Frame โดยใช้เทคนิคและโฟกัสการถ่ายภาพเดียวกับ Light Frame ปิดไม่ให้แสงเข้าไปยังเซ็นเซอร์รับภาพเหมือน Dark Frame แต่ตั้งค่า Speed Shutter เร็วที่สุด เท่าที่อุปกรณ์จะทำได้ เช่น 1/4000 หรือ 1/8000 สมมติเป็นภาพที่มีค่าในแต่ละพิกเซลได้ดังภาพที่ 6
จากภาพที่ 6 สังเกตว่ามีค่าพิกเซลไม่เป็น 0 และเป็นแถบในแนวตั้ง คาดว่าเป็นสัญญาณรบกวนที่เกิดจากเซ็นเซอร์แปรสัญญาณไม่สมบูรณ์
4. ถ่ายภาพ Flat Frame โดยใช้เทคนิคและโฟกัสการถ่ายภาพเดียวกับ Light Frame แต่ถ่ายภาพพื้นผิวที่มีความสว่างสม่ำเสมอกันและไม่จำเป็นต้องใช้ Speed Shutter เร็วที่สุดหรือเท่า Light Frame สมมติเป็นภาพที่มีค่าในแต่ละพิกเซลได้ดังภาพที่ 7
จากภาพที่ 7 เมื่อสังเกตค่าพิกเซลจะมากบริเวณตรงกลาง และขอบภาพจะมีค่าพิกเซลน้อยลง แต่มีบางพิกเซลที่มีค่าไม่ถึง 10 (วงสีเขียว) น่าจะเกิดจากผิวเลนส์หรือกระจกมีรอยขีดข่วนหรือฝุ่นผงติดอยู่
5. นำค่าพิกเซลในภาพ Flat Frame มาลบกับค่าพิกเซลในภาพ Bias Frame แบบ Pixel by Pixel คือ พิกเซลตำแหน่งเดียวกันนำค่ามาลบกัน เพื่อกำจัด Noise แบบแถบของ Flat Frame ดังภาพที่ 8
ภาพที่ได้ จากการนำ Flat Frame – Bias Frame นี้ เรียกว่า Master Flat Frame
6. นำค่าพิกเซลในภาพ Dark Frame มาลบกับค่าพิกเซลในภาพ Bias Frame แบบ Pixel by Pixel คือ พิกเซลตำแหน่งเดียวกันนำค่ามาลบกัน เพื่อกำจัด Noise แบบแถบ ของ Dark Frame ดังภาพที่ 9
ภาพที่ได้ จากการนำ Dark Frame – Bias Frame นี้ เรียกว่า Master Dark Frame
7. นำค่าพิกเซลในภาพ Light Frame มาลบกับค่าพิกเซลในภาพ Master Dark Frame และ Bias Frame แบบ Pixel by Pixel คือ พิกเซลตำแหน่งเดียวกันนำค่ามาลบกัน เพื่อกำจัด Noise แบบแถบ ของ Light Frame จากการลบด้วย Bias Frame และกำจัด Hot Pixel จากการลบด้วย Master dark Frame ดังภาพที่ 10
จากภาพที่ 10 จะเห็นได้ว่า Hot Pixel ได้ถูกกำจัดออกไปแล้วในพิกเซลตำแหน่งวงกลมแดง แต่จากค่าพิกเซลที่เห็นทั้งภาพ พบว่า ภาพยังสว่างตรงกลางและจางลงที่ขอบภาพ (Vignetting) อีกทั้งตำแหน่งพิกเซลในตำแหน่งสีฟ้าและสีเขียวยังมีค่าน้อยกว่าพิกเซลข้างเคียง ซึ่งเกิดจาก dust and scratches
8. นำค่าพิกเซลในภาพที่ได้จาก Light Frame – Master Flat Frame – Bias Frame แล้ว มาหารกับค่าพิกเซลในภาพ Master Flat Frame แบบ Pixel by Pixel คือ พิกเซลตำแหน่งเดียวกันนำค่ามาหารกัน เพื่อกำจัด Vignetting และ dust and scratches ของ Light Frame ได้เป็น Calibrated Frame ดังภาพที่ 11
จากภาพที่ 11 จะเห็นได้ว่า ค่าพิกเซลบริเวณพื้นหลังมีค่าเท่ากับ 10 เท่ากันหมด และบริเวณที่เป็นภาพของวัตถุมีค่าเป็น 90 เท่ากัน ภาพที่ได้หลังจากกระบวนการ Calibrated นี้ เรียกว่า Calibration Frame พร้อมที่จะนำไปเข้าสู่กระบวนการ Processing ภาพ อย่างอื่นต่อไป
การวัดสัญญาณภาพถ่ายหรือการเทียบคุณภาพของภาพที่ได้สามารถวัดได้จากอัตราส่วนระหว่างสัญญาณของภาพ(Signal) ต่อสัญญาณรบกวนต่าง ๆ (Noise) หรือเรียกสั้นว่า SNR ย่อมาจาก Signal Noise Ratio
หากใช้คณิตศาสตร์อย่างง่ายมาอธิบายจะได้ว่า สัญญาณรบกวน(Noise) คือความแปรปรวนของสัญญาณภาพ ดังนั้น
โดยที่ n คือ จำนวนภาพ
S_n คือ สัญญาณภาพที่ n
จาก SNR = (สัญญาณภาพ (S))/(สัญญาณรบกวน(N))
จากตารางข้างบนนี้ สามารถอธิบายได้ตามขั้นตอนดังนี้
1. สมมติว่า ถ่ายภาพทั้งหมด 10 ภาพ (1) และวัดค่าสัญญาณภาพของแต่ละภาพได้ตามช่อง Signal (2)
2. นำค่า Signal (2) แต่ละภาพมารวมกันตามจำนวนภาพ จะได้ตามช่อง Signal รวม(3)
3. เริ่มหาค่า Noise โดยนำค่า Signal ของแต่ละภาพมายกกำลัง 2 ได้ตามช่อง Signal ^ 2 (4)
4. นำค่า Signal ^ 2 (4) แต่ละภาพมารวมกันตามจำนวนภาพ จะได้ตามช่อง Signal ^ 2 รวม (5)
5. นำค่า Signal ^ 2 รวม (5) มาหาค่าเฉลี่ยโดยหารด้วยจำนวนภาพ (n) จะได้ตามช่อง Signal ^ 2 รวมเฉลี่ย (6)
6. หากรากที่สองของค่า Signal ^ 2 รวมเฉลี่ย (6) จะได้เป็นค่า Noise เฉลี่ย ตามช่อง Noise เฉลี่ย (7)
7. นำ Signal รวม(3) มาหาร Noise เฉลี่ย (7) ได้เป็น SNR (8)